
西门子辽阳授权代理商
已启用的定位轴或速度轴可以执行运动控制作业。
- 速度控制和定位控制处于状态。
- 工艺对象的实际值有效。
Busy OUTPUT BOOL FALSE TRUE 正在执行作业。
Error OUTPUT BOOL FALSE TRUE 运动控制指令 MC_Power 出错。
错误的原因可以从参数“ErrorID”中找出。
ErrorID OUTPUT WORD 16#0000 参数“Error”的错误 ID (页 437)
引言
11.1 S7-1500 运动控制 V2
S7-1500 Motion Control V13 Update 3
功能手册, 07/2014, A5EAC 261
启用工艺对象
要启用一个工艺对象,请将参数 Enable 设为 TRUE。
如果参数 Status 的值显示为 TRUE ,则表示工艺对象已经启用。
启用工艺对象时,如果轴处于运动状态(显示实际速度),则轴将以“工艺对象 > 组态 >
扩展参数 > 动态”(Technology object > Configuration > Extended parameters >
Dynamic limits) 中设定的减速度 (<TO>.DynamicLimits.MaxDeceleration)
进行制动,直至设定值 0。 这种制动减速可被运动控制作业超驰。
说明
确认工艺后自动启用
如果工艺对象因工艺而禁用,则在排除故障原因并确认之后,将自动启用该
工艺对象。 这就要求参数“Enable”在此中保留值为 TRUE。
禁用工艺对象
要禁用一个工艺对象,请将参数 Enable 设为 FALSE。
如果轴处于运动中,则它会根据所选的“StopMode”进行制动,并停止。
如果“Busy”和“Status”参数的值显示为 FALSE ,则表示工艺对象已经禁用。
通过 PROFIdrive 连接驱动装置
如果使用 PROFIdrive 连接驱动装置,则设定值、启用和驱动装置状态将通过
PROFIdrive 报文传输。
● 启用工艺对象和驱动装置
参数“"Enable" = TRUE”用来启用工艺对象。 驱动装置按照 PROFIdrive
进行启用。
如果变量 <TO>.StatusDrive.InOperation 显示为 值 TRUE
,则表示驱动装置已就绪,可以执行设定值。 参数 "Status" 被设置为值 TRUE 。
● 禁用工艺对象和驱动装置
使用参数 "Enable" = FALSE,"Status" 参数将被设置为 值
FALSE,且根据所选“StopMode”对轴进行制动。 驱动装置按照 PROFIdrive
进行禁用。
引言
11.1 S7-1500 运动控制 V2
S7-1500 Motion Control V13 Update 3
262 功能手册, 07/2014, A5EAC
模拟驱动装置接口
设定值通过模拟量输出进行输出。 也可通过数字量输出组态一个启用
(<TO>.Actor.Interface.EnableDriveOutput),通过数字量输入组态一个就绪
(<TO>.Actor.Interface.DriveReadyInput)。
● 启用工艺对象和驱动装置
参数 "Enable" = TRUE时,启用输出 (“Enable drive output”) 将被置位。
如果驱动装置通过就绪输入反馈回就绪 ("Drive ready input"),则 "Status"
参数和工艺对象的 <TO>.StatusDrive.InOperation 变量被置为
TRUE,且模拟量输出上的设定值被更改。
● 禁用工艺对象和驱动装置
使用参数 "Enable" = FALSE,"Status" 参数将被设置为 值
FALSE,且根据所选“StopMode”对轴进行制动。 达到设定值 0 时,启用输出将被置为
FALSE。
更多信息
有关启用和禁用工艺对象和驱动装置的更多信息,请参见附录“MC_Power 功能图
(页 440)”。
参见
错误 ID (页 437)
引言
11.1 S7-1500 运动控制 V2
S7-1500 Motion Control V13 Update 3
功能手册, 07/2014, A5EAC 263
11.1.1.2 MC_Power: 功能图 V2
功能图: 启用工艺对象和响应示例
工艺对象可通过“Enable_1= TRUE”启用。 在时间①可以从 "Status_1"
中读取成功的启用信息。 之后,轴将根据“MC_MoveVelocity”作业 (A2) 。
轴的速度曲线可从“Velocity Axis_1”中读取。
在时间 ②,工艺对象出错,工艺对象禁用(响应: 取消启用)。
轴将根据驱动装置中的组态进行制动,并转入停止状态。 工艺对象被禁用后,Status_1
将复位。 由于轴不是通过“Enable_1” = FALSE
禁用的,所选“StopMode”并不适用。 错误原因的排除和确认在时间 ③
进行。
由于仍然会置位“Enable_1”,工艺对象将被启用。
从“Status_1”中可以读取成功的启用信息。 下一个工艺对象通过"Enable_1" = FALSE
S7-1500 运动控制 V2
S7-1500 Motion Control V13 Update 3
264 功能手册, 07/2014, A5EAC
11.1.2 MC_Home
11.1.2.1 MC_Home: 回原点工艺对象,设置回原点位置 V2
说明
使用运动控制指令“MC_Home”,可以在工艺对象中的位置和机械位置之间建立关系。
将工艺对象中的位置值为回原点标记。
该回原点标记代表一个已知的机械位置。
回原点将按照参数 "Mode" 选定的和“工艺对象 > 组态 > 扩展参数 >
回原点”(Technology object > Configuration > Extended parameters > Homing)
下设定的组态进行。
在 V2.0 工艺版本的框架中,S7-1200 运动控制和 S7-1500
运动控制的“MC_Home.Mode”参数已化。这会为“MC_Home.Mode”参数新分配参数
值。工艺版本 V1.0 和 V2.0 的“MC_Home.Mode”参数的比较,请参见版本概述
(页 93)部分。
在“工艺对象 > 组态 > 扩展参数 >动态默认设置”(Technology object > Configuration >
Extended parameters > Dynamic default values )
下预设的值用于动态值“加速度”、“减速度”和“加加速度”。
1. PC的安装环境(了解) |
PC的安装方法 |
PC正确安装的注意事项 |
当可编程控制器垂直安装时,要严防导线头、铁灰尘等脏物从通风窗掉入可编程控制器内部以及导线头等脏物损坏可编程控制器印刷电路板,使其不能正常工作。 |
| F1系列可编程控制器电源技术规范表 |
 |
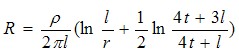
可编程控制器F1-30MR基本接线图如下图所示; |
 |
系统供电的保护措施 |
 |
3)接地 |
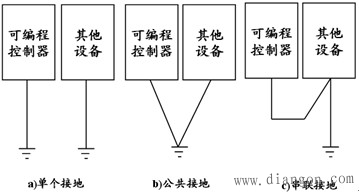 |
在实际控制系统中,正确接地是重要而又复杂的问题,理想的情况是一个系统的所有接地点与大地之间阻抗为零,但很难以做到的。在实际接地中总存在着连接阻抗和分散电容,如果地线不佳或接地点不当,都会影响接地质量。为保证接地质量,在接地时要注意以下几点: |
 |
b) 水平埋设时,接地电阻为: |
 |
可见,接地电阻随接地棒埋设深度t的增加而减小,当埋设较深时,上述两式近似为: |
降低接地电阻的措施 |
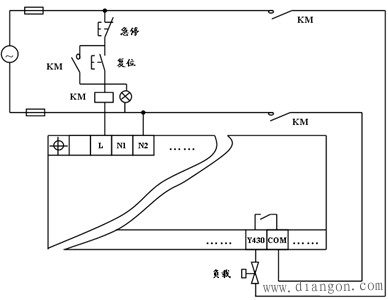 |
二、 F1系列 PC 输入接线 |
 |
输入电路 |
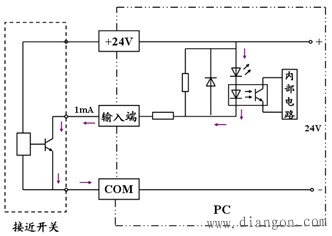 |
输入接线注意事项 |
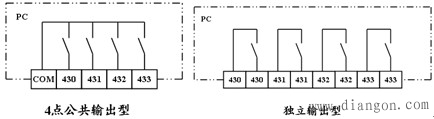 |
举例:继电器输出接线实例 |
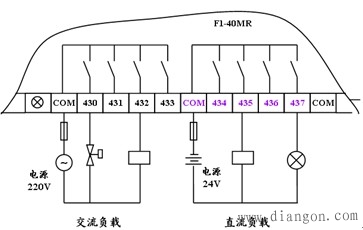 |
输出接线注意事项 |
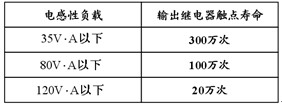 |
PC的输出负载可能产生噪声干扰,要采取措施加以抑制。如电磁继电器和电磁阀可产生1000V以上的噪声。对于交流噪声,可在每个装置的线圈上并联上一个浪涌吸收电路;对于直流噪声,在每个装置的线圈上并联一个二极管,如下图所示。 |
对于能使用户造成伤害的危险负载,除了在控制程序中加以考虑之外,应设计外部紧急停车电路,使得 PC 发生故障时,能将引起伤害的负载的电源切断。 |