





西门子6SL3040-0PA01-0AA0详细说明
①输入指示灯
标有“IN"标记旁边的一排指示灯为输入信号指示灯,如图3-1-3中的“⑤",每一盏指示灯分别对应PLC的一个输入信号,当对应的输入端有信号时,该指示灯就亮,当对应的输入端无信号时,该指示灯就熄灭。
②输出指示灯
标有“OUT"标记旁边的一排指示灯为输出信号指示灯,如图3-1-3中的“⑩",每一盏指示灯分别对应PLC的一个输出信号,当对应的输出端有信号输出时,该指示灯就亮,当对应的输出端无信号输出时,该指示灯就熄灭。
③型号标志
PLC中的“FX2N – 48 M R"就是PLC的型号标记,其型号各部分的含义如下:
① ②③④
①为系列名称;②为输入和输出点数之和,48为24点输入24点输出;③为单元种类,M表示基本单元,E表示输入输出混合扩展模块及扩展单元,EX表示输入专用扩展模块,EY表示输出专用扩展模块;④为输出形式,R表示继电器输出,T表示晶体管输出,S表示晶闸管输出。
④工作状态指示灯
PLC共有四盏工作状态指示灯,标有“POWER"的指示灯为PLC电源指示灯,当PLC接通电源时,该指示灯亮;标有“RUN"的指示灯为PLC运行指示灯,当PLC处于运行状态时,该指示灯亮;标有“BATT.V"的指示灯为PLC内部锂电池欠压指示灯,当锂电池电压降低到需要更换时,该指示灯亮;标有“PROG•E"和“CPU•E"的指示灯为错误指示灯,当该指示灯闪烁时,表示内部写入PLC的程序有错误,当该指示灯常亮时,表示PLC内部CPU出错
如伺服驱动带增量式编码器,共计三种回参考点模式可用:
通过数字量输入信号 REF 设置回参考点
外部参考点挡块(信号 REF)和编码器零脉冲
仅编码器零脉冲
如伺服驱动带值编码器,共计三种回参考点模式可用:也可以通过 BOP 功能"ABS"调整值编码器(将当前位置设为零位)。详细信息可参见章节"调整值编码器" 。
通过设置参数 p29240 可以选择其中一种模式:
参数
值
描述
p29240
0
通过外部信号 REF 回参考点
1(默认值)
通过外部参考挡块(信号 REF)和编码器零脉冲回参考点
2
仅通过零脉冲回参考点
提示
值编码器回参考点模式
如连接值编码器,三种回参考点模式可用。可以通过参数 p29240 选择不同的回参考点模式。当 p29240 = 1 或 2 时,仅能在使用“ABS"功能之前执行回参考点操作。一旦使用“ABS"功能,该两种回零方式将不再生效。
通过数字量输入信号 REF 设置回参考点(p29240=0)
使用报文 111 时,可通过 PROFINET 控制字 POS_STW2.1 设置数字量输入信号 REF:
控制字
设置
描述
POS_STW2.1
1
设置参考点。
0
不设置参考点。
使用报文 110 时,可通过 PROFINET 控制字 POS_STW.1 设置数字量输入信号 REF:
控制字
设置
描述
POS_STW.1
1
设置参考点。
0
不设置参考点。
使用报文 7 和 9 时,可通过数字量输入设置数字量输入信号 REF。
提示
设置回参考点的前提
伺服电机必须处于“伺服开启"状态且保持静止状态。
信号 REF 在以下情况下必须是 OFF 状态:
-
上电前
-
从另一个回参考点模式切换到该模式时
-
从另一种控制模式切换到基本定位器控制模式时
提示
通过数字量输入信号 REF 设置回参考点时,必须确保控制字 STW1.11 = 0。
在信号 REF 上升沿时,当前位置设为零,伺服驱动回参考点:


小心
回参考点时参考点可能不固定。
伺服电机必须在“伺服开启"状态,回参考点时参考点才固定。
外部参考点挡块(信号 REF)和编码器零脉冲(p29240=1)
使用报文 111 时,可通过 PROFINET 控制字 POS_STW2.2 设置数字量输入信号 REF:
控制字
设置
描述
POS_STW2.2
1
参考点挡块激活。
0
参考点挡块未激活。
使用报文 110 时,可通过 PROFINET 控制字 POS_STW.2 设置数字量输入信号 REF:
控制字
设置
描述
POS_STW.2
1
参考点挡块激活。
0
参考点挡块未激活。
使用报文 7 和 9 时,可通过数字量输入设置数字量输入信号 REF。
回参考点由控制字 STW1.11 触发。伺服驱动加速到 p2605 中的速度来找到参考点挡块。搜索参考点挡块的方向(CW 或 CCW)由 p2604 定义。当参考点挡块到达参考点时(信号 REF:0→1),伺服电机减速到静止状态。伺服驱动加速到 p2608 中的速度,运行方向与 p2604 中的方向信号 REF(1→0)应该关闭。达到个零脉冲时,伺服驱动开始向 p2600 中定义的参考点以 p2611 中的速度运行。伺服驱动到达参考点(p2599)时,信号 REFOK 输出。设置 STW1.11 为 0,回参考点成功。
整个过程如下图所示:

按照以下步骤以该模式回参考点:
设置相关参数:
参数范围出厂设置单位描述p2599-2147482648 至 21474826470LU设置参考点坐标轴的位置值。p2600-2147482648 至 21474826470LU参考点偏移量p2604 1)0 至 10-设置搜索挡块开始方向的信号源:p26051 至 4000000050001000 LU/min搜索挡块的速度p26060 至 21474826472147482647LU搜索挡块的大距离p26081 至 400000003001000 LU/min搜索零脉冲的速度p26090 至 214748264720000LU搜索零脉冲的大距离p26111 至 400000003001000 LU/min搜索参考点的速度1)使用报文 111 时,p2604 由控制字 POS_STW2.9 赋值。
- 0:以正向开始
- 1:以负向开始
配置信号 REF。
请参见章节"数字量输入/输出(DI/DO)" 。
设置 STW1.11(0→1)从而开始回参考点。
提示
回参考点时,如 STW1.11 设为 0,回参考点停止。
当伺服驱动到达参考点时,信号 REFOK(若已配置)输出。
设置控制字 STW1.11 为 0,回参考点成功。
仅编码器零脉冲(p29240=2)
该模式下,挡块不可用。回参考点由控制字 STW1.11 触发。伺服驱动加速到 p2608 中的速度,运行方向(CW 或 CCW)由 p2604 。达到个零脉冲时,伺服驱动开始向 p2600 中定义的参考点以 p2611 中的速度运行。伺服驱动到达参考点(p2599)时,信号 REFOK 输出。设置控制字 STW1.11 为 0,回参考点成功。
整个过程如下图所示:

按照以下步骤以该模式回参考点:
设置相关参数:
参数范围出厂设置单位描述p2599-2147482648 至 21474826470LU设置参考点坐标轴的位置值。p2600-2147482648 至 21474826470LU参考点偏移量p26040 至 10-设置搜索挡块开始方向的信号源:p26081 至 400000003001000 LU/min搜索零脉冲的速度p26090 至 214748264720000LU搜索零脉冲的大距离p26111 至 400000003001000 LU/min搜索参考点的速度- 0:以正向开始
- 1:以负向开始
设置 STW1.11(0→1)从而开始回参考点。
提示
回参考点时,如 STW1.11 设为 0,回参考点停止。
当伺服驱动到达参考点时,信号 REFOK(若已配置)输出。
设置控制字 STW1.11 为 0,回参考点成功。
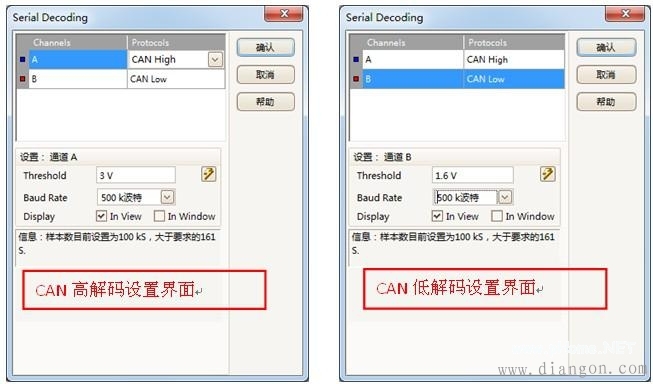
设置步骤如下:
1)设置a通道协议:can high
2)设置can低判断阈值,如3v。该阈值用于判断can-l电平是“0”或“1”.
3)设置总线波特率,即目前测试网络的波特率,例如500k波特。
4)设置显示模式,选择“在视图中”或“在窗口中”查看can数据。
in view: 在视图中,在波形显示窗口查看解码之后的can数据。
in bbbbbb: 在窗口中,在表格中查看解码之后的can数据。
3、从can高波形和can低波形上解码
1)将can网络中的canh端接入到示波器a通道(示波器通道任意选择)探头的正极,can网络的gnd连接探头的负极。
2)将can网络中的canh端接入到示波器b通道(示波器通道任意选择)探头的正极,can网络的gnd连接探头的负极。
注意:canh和canl使用的测试通道可以自由选择。只是在进行解码设置时,对应正确即可。
3 )点击picoscope6工具菜单,选择串行解码功能。弹出串行解码设置窗口。
在一个窗口分别设置canh和canl的解码设置,具体参考3.1和3.2章节的设置。如下图所示:
四、使用注意事项
pico示波器进行串行解码有一个技术难点:pico示波器的解码以完整的一个can数据帧为单位,即只有采集到完整的一帧can报文,才能将该数据帧完整的解析出来。
1) 采集canh和canl波形时,注意时基的设置。即保证每一个波形页面至少能够采集到一个完整的数据帧,此时才能够解析出can报文。对于can总线来说,时基设置在1ms/div或者大于1ms/div即可。
2) 注意采样率的设置,要保证采集到的波形不失真。例如can总线的波特率为500kbps,那么采样率只有大于1ms/s,才能够采集到正确的波形(满足乃奎斯特定律)。
3 )示波器的波形(一个显示页面)与波形之前是不连续的,总是或多或少一些间隙。当在进行can总线解码时,波形页面的边缘会有一些无法被解析的数据帧,主要原因是波形页面边缘将一个完成的数据帧截断了,以至于无法得到争取的解析。如下图所示:
