





西门子6SL3055-0AA00-5BA1详细说明
一、温度的采集
1. 温度传感器与选型
1)热电偶选型
2)热电阻选型
2. 模拟量模块与选型
1)模拟量模块的主要特性
2)模拟量模块的测量信号类型及测量范围设定
3) 模拟值的表示
二、工程数值换算功能FC105的应用
用来将一个输入的整型值(例如模拟量I/O格式的整型值)转换为实型值,在工程中具有广泛的应用。下表是FC105输入输出参数关系:
参数
I/O类型
数据类型
说明
存储器类型
EN
Input
BOOL
为1时激活该功能运行
I,Q,M,D,L
ENO
Output
BOOL
如果功能运行无错误,则输出状态1
I,Q,M,D,L
IN
Input
INT
被转换的工程单位输入值
I,Q,M,D,L,P,常数
HI_LIM
Input
REAL
工程单位上限值
I,Q,M,D,L,P,常数
LO_LLM
Input
REAL
工程单位下限值
I,Q,M,D,L,P,常数
BIPOLAR
Input
BOOL
为1时输入值为双极性,为0时输入值为单极性
I,Q,M,D,L
OUT
Output
REAL
数据转换的结果
I,Q,M,D,L,P
RET_VAL
Output
WORD
若运行无错误则返回#16#0000
若有错则返回相应出错数值
I,Q,M,D,L,P
FC105的数值换算公式为:
OUT=[((FLOAT(IN)-K1)/(K2-K1))*(HI_LIM-LO_LIM)]+LO_LIM
对双极性,输入值范围为-27648到27648,对应K1=-27648,K2=+27648
对单极性,输入值范围为0到27648,对应K1=0,K2=+27648
三、PID控制原理
1. PID控制器基本概念
比例(P)、积分(I)和微分(D)
2. 闭环控制系统特点
3. PID控制器的参数整定
(1)预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;
(3)在一定的控制度下通过公式计算得到PID控制器的参数。
4. PID控制器的数字化
5. PID控制器的主要优点
四、PID指令及应用
1. PID指令主要参数的意义
2.SFB41的原理框图和输入输出参数
3.PID指令的使用注意事项
4.PID指令对温度的控制编程
(1)在启动时执行的组织块OB100中调用初始化值,
(2)在OB35中调用连续PID控制功能块SFB41
1、十字路口双向交通灯自动控制系统动作要求如时序图所示。


2、思考问题
(1).该控制系统是否属于顺序控制?是哪种结构?
PLC程序设计方法比较
下面将经验设计法和顺序控制设计法进行适当比较,以便设计时选用。
采用经验设计法设计梯形图时,不可能找出一种简单通用的设计方法。
顺序控制设计法将整个程序分成了控制程序和输出程序两个部分。由于步是根据输出Y的状态划分的,M和Y之间具有很简单的逻辑关系,输出程序的设计极为简单。而代表步的辅助继电器或状态继电器的控制程序,不管多么复杂,其设计方法都是相同的,并且很容易掌握。
(2).该控制系统工作步如何划分?共有多少工作步?
(3).输入/输出信号有那些?
3、信号分配

4、硬件设计

5、功能图的绘制

6、梯形图程序

7、指令程序

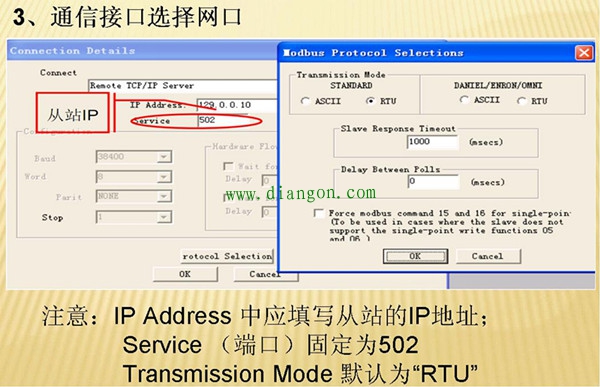
modbus通信分为串口和以太网,无论是串口还是以太网,只要是标准modbus,就可以用modbus模拟器进行调试。按以下几步进行调试。
1、使用modbus模拟器进行调试
如果对方是modbus子站(从站),那么用modscan32(modbus主站模拟器)进行调试,通常仪表、流量计、液位计、都是作为modbus从站提供数据。使用方法如图3、 4所示。

如果对方是modbus主站,我们作为modbus从站,我们可以用modsim32(modbus从站模拟器)与对方主站通讯。使用方法如图5:
如果这一步通不上,可能是以下几种原因:

a 线路不通,如果是以太网,请ping一下对方的ip地址,如果是串口请检查串口接线是否正确, 接线方式见串口接线方式;
b 串口参数不正确,通讯双方串口参数必须完全一样,否则调不通的。串口参数可以查阅设备说明书或咨询对方厂商,千万不要去猜串口参数,猜中的可能性比中六合彩的可能性还低一半,串口波特率、数据位、停止位、校验位有96种组合,猜不中也试不完,*省时省力方法就是看说明书或咨询对方厂商。
c 设备地址或数据点表不正确。
如果通讯软件或模拟器提示“超时”,请将串口超时时间设大一些(3000——5000毫秒)。
2、使用modbus通讯软件调试
上一步调通后,再用我们的modbus通讯软件调试,如果我们的软件调不通,通常*大可能性是配置错误,尤其是使用配置文件的通讯软件,经常会出现以下几种错误:
l服务器参数不正确;
l 配置文件中实际配置的点名与pointnum= 后面的点数不一致;
l 点没有按顺配置
3、检查通信点值是否正确 中间point4至point8没有配置,既使这些点不用,也要将点名写成一个dcs数据库不存在点名,不能空着不写。
如果能读到数据,但数值不正确,通常有两种可能:
l 数据起始地址错误。如果对方给的点表是400001开发,地址中的“4”表示要使用3号功能读数据,1表示第一个寄存器,那么对应的地址是从0开始的,也就是说这个点的地址为0,在配置文件中起始地址写0,写400001、400000、1都是错的。如果对方给的点表是400000或0开始,那么他给的就是地址,不是寄存器号,就不需要再减1了。如果是hollias comm v2.0.0软件,这个软件会自动减1,只需要的填写寄存器号就行,其它的使用配置文件的(.ini文件)modbus软件都是需要减1的。
l 数据类型不正确。通讯软件安装后,在安装目录下都会有说明书,请仔细阅读使用说明书,modbus软件说明书都会说明浮点数字节顺序,因为浮点数有四个字节,通常都是高字节在前、低字节在后,但由于plc内部字节存储顺序与pc机不一样,或者有些厂商就是不走寻常路,字节顺序会出现各种组合,请按说明书选择数据类型。如果不会选或看不懂,*简单的办法就是配置四个点,每个点都选择一种不同的类型,总有一个点的数值是正确的,那么就选择这种类型