





西门子6ES7 211-1HE40-0XB0型号介绍
系统的控制信号功率很低,如用ttl数字提供的5v/18ma信号进行控制。而产生1.2n.m转矩的磁阻式步进电机,通常需要5v/3a的额定值对绕组励磁。控制电路连接到步进电机前必须经过几级开关放大。许多制造厂已在提供与步进电机相匹配的驱动电路。步进电机用户在这个领域内仍有相当大的改革余地。本节就步进电机对驱动电路的基本要求,介绍其基本驱动电路和一些常用的、比较完善的驱动电路。
由步进电机的动态特性可知,若步进电机以高速工作,则时间常数的影响显著增大:导通期间,电流不能迅速上升到额定值;截止期间,绕组电流不能立即消失。步进电机产生的转矩明显下降。励磁绕组两端在截止时刻还会产生很高的反电势,若不采取措施,则有可能损坏开关元件。
针对这些问题,通常对驱动电路有如下要求:(1)能够改善电流波形的上升沿和下降沿,即产生接近矩形的电流波形。考虑电路简单,成本低等因素。小功率步进电机可通过串联限流电阻减少时间常数,拓宽工作频率范围。为了维持电机静止时的相电流额定值,电压必须增加。需要的直流电源容量比较大。电机静止时,电源输出的主要部分消耗在串联的限流电阻上。这时,限流电阻上产生的热量必须迅速散发,否则,可能出现问题。简单的
串联限流电阻是改善速度范围的—种低效的方法。对大功率或较大功率的步进电机而言,常使用高低压或斩波等方式驱动。这些驱动方式电路较复杂,但驱动特性好,且有较高的效率。(2)设置供截止期间释放电流流通的回路,降低绕组两端产生的反电势,加快电流衰减。(3)要求驱动电路的功耗低、效率高。
为了提高步进电机定位的分辨率,减少过冲和抑制振荡,有时要求驱动电路具有细分功能,将常规的矩形波供电改变成阶梯波供电。
1. 单极性驱动电路
图1是用于三相磁阻式步进电机的一种简单的单极性驱动电路。每相绕组由独立的驱动电路励磁,驱动电路出小功率“相控制信号”控制。这个控制信号经过

图1 三相单极性驱动电路及释放电流通路
放大加到开关管的
基极,控制相绕组的导通或截止。若注入开关管基极的电流足够大,则开关管饱和导通(压降为0.1v左右),相绕组受到励磁。直流电压几乎全部加在相绕组和与它串联的限流电阻上。
vs=i(r+r) (1)
式中 r为相绕组电阻;r为限流电阻;vs 为产生额定绕组电流i的直流电源电压。
通常,相绕组的电感很大,它的电气时间常数(电感/电阻)大。相电流上升到额定位的建立过程显得太慢。为了在高速情况下获得令人满意的电机动作,通过增加限流电阻,并成比例地增加电源电压,能够减少相电路的电气时间常数,电机能在很大的速度范围内工作。
相绕组电感的另—种影响是相电流不能立即切断。如果突然去掉开关晶体管的基极驱动电流,晶体管的集电极和发射极之间将出现一个很大的感应电压,这个电压可能使驱动电路损坏。为了避免这种危险,常为相电流提供另一条电流通路-释放电路。切断开关晶体管时,相电流能够沿着由释放和释放电阻rf提供的通路衰减。如果相电流已达到它的额定值i,则断开晶体管开关后,开关晶体管两瑞立刻出现大电压(voemax)。忽略释放二极管两端的正向压降,得:
voemax=vs+rfi (2)
相电流在释放电路里衰减,断开时贮存在相电感里的磁能消耗在释放回路电阻上(绕组电阻+限流电阻+释放电阻)。
设计举例:一台三相磁阻式步进电机,总的相绕组电阻为lω,平均相电感为40mh;额定相电流为2a。试设计一个简单的单极性驱动电路,该电路在相导通时它的电气时间常数为2ms,截止时时间常数为l ms。
由电气时间常数=电感/电阻,考虑2ms的导通时间常数,总的相电阻=40/2=20ω。因为绕组电阻为总的相电阻提供了1ω,限流电阻=19ω。
这个电阻在该相连续受额定电流(2a)激励时,必须能够散发所产生的能耗。额定功率=电流)2×(电阻)=22×19=76w。
直流电源电压可以利用式(4.1)确定,电源电压=额定电流这个释放电阻的功率取决于电机的工作速度。截止时刻贮存在
相电感里的能量为:
贮存的能量=电感×(电流)2/2=40×4/2mw=0.08w。
贮存的这些能量消耗在相电阻和释放电阻上。在这个例子里,相电阻和释放电阻相等,每当对应的相截止时,贮藏的能量一半消耗在释放电阻上。例如,在每秒600步的情况下,三相中的每一相每秒钟截止200次。消耗在释放电阻上的平均功率为200×0.04w=8w。高速下的功耗分析比较复杂,因为截止时的相电流本身是工作速度的函数。假定相电流已经达到了它的额定值,以此为依据,可得到释放电阻在“坏情况”下的功耗估计值。
后,讨论两个半导体器件。当晶体管导通时,释放二极管必须经受得住等于直流电源电压的反向电压;当晶体管刚刚截止时,它必须能通过等于额定相电流的峰值正向电流。开关晶体管必须能承受由式(2)确定的集电极-发射极电压:voemax=vs+rfi=40×(20×2)=80v。
这只晶体管必须能通过相电流(2a);在饱和的情况下必须有尽可能高的电流增益。
2.(高低)双电压驱动电路
高低压驱动电路里有两种电源电压。接通或截止相电流时使用高电压;继续励磁期间使用低电压,把电流维持在额定值上。
图2是单极性高低压驱动电路中的一相电路。开始激励绕时,两只晶体管tl和t2导通,加在相绕组上的电压等于两个电源电压之和(vl+vh),二极管d2受vh反偏。因没有串联电阻限制电流,它开始迅速上升。经过很短时间,晶体管t2截止,绕组电流沿电源电压vl、二极管d2和晶体管tl流动。
绕组额定电流由电压vl维持,经过选择可使vl/r=额定电流。相激励结时,晶体管tl也截止。绕组电流沿着经过二极管dl和d2的通路流动。因为释放通路里包含很高的电源电压vh,电流迅速衰减。
低压驱动电路比较简单,只要求控制电路正确控制每次励磁开始阶段晶体管t2的导通和关断时刻。因为这个晶体管的导通时间由绕组时间常数决定,为一固定值,可用相励磁信号触发一个固定周期的单稳电路来实现。
前面在分析驱动电路性能时未考虑由转子运动感应的电压。一旦绕组电流建立了,只有低压电源有效;这个电压也许不足以克服其余励磁时间间隔里内感应产生的电压。这是高低压驱动电路存在的一个缺点。
3.斩波驱动电路
以单极性形式描述的斩波驱动电路如图2所示,它的电源电压比较高,每当电流降到额定

图2单极性高低压驱动电路中的一相电路
值之下时,电源电压就加到相绕组上。
如果存在相励磁信号(励磁期间,晶体管t1导通),晶体管t2的基极驱动则受绕组电流在小电阻rc上的压降vc控制。因为相电流开始时为零,vc等于零,此时令晶体管t2导通。全部电源电压加在相绕组上,如图3定时图所示。在电源电压的作用下,相电流迅速上升,直到稍微超过额定值i。此时,控制电压为 r0i+e,足以截止晶体管t2。t2截止后,外电压不再加在相绕组上,电流沿包含t1、 r0和二极管d1的通路衰减。这个电流通路的电阻很小,没有反向电压,电流衰减比较慢。因为电阻r0仍包括在电路里,能够监视绕组电流;当控制电压降到r0i-e时,晶

图3 斩波驱动电路
体管t2导通。全部电源电压又
加在绕组上,电流迅速上生到稍大于额定值。在整个激磁时间里重复这种循环,通过“通-断”闭环控制使绕组电流维持在它的额定值附近。
激磁结束后,两只晶体管都截止,绕组电流经过二极管dl和d2释放。电流回路包含反向的电源电压,它强迫电流迅速降到零。截止时刻贮存在绕组电感里的大部分能量返回到电源,系统效率很高。
斩被驱动的控制电路比较复杂,例如,t2的基极驱动需要有一个控制电压为vc的史密特触发电路,以此产生跃迁电平。如果这些电平没有被很好隔开,则晶体管t2以很高频率导通和截止,对邻近设备引起干扰和在电机里产生附加铁损。(版权所有)斩波驱动毕竞有很多优点:充分利用了现有的电源电压,能够在可能的宽速度范围内工作,消除了限流电阻上的功耗,系统效率非常高等。
4.调频调压驱动

图4斩波驱动电流波形和晶体管开关时间
这是一种电源电压随工作频率而变的驱动方式。即低频时用低压驱动,高频时用高压驱动。因电压随频率而变,故既可提高高频输出,又能避免低频可能出现的振荡。
与一般驱动电路相比,这种驱动电路增加了一套比较电路和调压电路。调压电路输出的电压高低由比较器的输出控制,而比较器的输出又由积分器的输出与锯齿波发生器的比较结果决定。当控制步进电机动作的频率变化时,积分器的输出和比较器的输出都跟着改变,从而达到改变调压器输出的目的。
5.细分驱动
这种驱动方式也叫做微步驱动。它将电机绕组中的电流细分,由常规的矩形波供电改为阶梯波供电。这时,绕组中的电流或经过若干个阶梯上升到额定值,或以同样的方式从额定值下降到零。这种驱动电源的结构比较复杂,有如下特点:
(1)在不改变电机内部参数的情况下,能使步距角减小,步进误差减小。即提高了分辨率和步距精度。
(2)减弱了低频振荡问题。经过细分后,驱动电流的变化幅度大大减少,故转子到达平衡位置时的过剩能量也大为减少;另一方面,控制信号的频率提高了n倍(细分数),故可远离转子的低频谐振频率。运用细分驱动不仅能使电机运行平稳,还能减弱或消除振荡。
除了上述特点之外,因细分增加了运行拍数,放还可获得较大的起动转矩。
通常细分电路由细分环行分配器、放大器和合成器等部分组成。可以先分别放大环行分配器输出的方波,在电机绕组中叠加起来,形成阶梯波;也可以先把环行分配器输出的方波叠加在一起形成阶梯波,对阶梯波放大去驱动步进电机。这两种细分电路的灵活性都比较差。近几年来,国内外常用微机控制细分电路,使它的性能和使用的灵活性都有了显著改善。
以直线近似静转矩/位置曲线(t/θ曲线),可说明细分工作原理。由t/θ曲线可知,(1)转矩t与相电流i、位置θ的关系可表示为t=f(i、θ)。若i不变,则t=fi(θ);θ固定,则t=/fθ(i)。(2)各相t/θ曲线之间的位移为步距角θb。若以不同大小的电流通入步进电机的两相或几相绕组中,各相产生的转矩之和为零的位置即为整步平衡位置之间的细分平衡位置。于是,设计细分驱动电路的主要任务转化成为确定和产生对应各个平衡位置应通入各相绕组的电流大小。图5是细分驱动电路的原理。与细分电流对应

图5 细分驱动电路的原理电路
的数字代码存在prom或eprom中。工作时,微机或计数电路按照要求对prom寻址,prom输出的数字代码经数模转换器转换成相应的模拟电流,驱动步进电机作微步转动。为保证恒流驱动,a、b、c各相都引入反馈电流ifb。
如果细分的平衡位置用n(θb/n)描述,其中n为步距角θb的细分数,n为整数1、2、3、…,则由平衡位置的总转矩为零可求得各相电流的大小。
若以正弦曲线近似特性曲线t/θ,也可得到各细分平衡位置的绕组电流,当然i1、i2的表达式要复杂得多,将这些计算得到的电流大小转换成对应的数字
代码存入eprom,工作时取出即可使用。
在要求**细分的场合,i=f (θ)的关系可由实验确定,用对应实际电流值的数字代码写入eprom。
由硬件构成的纫分驱动电路见图6。此电路由可逆计数器、eprom、d/a转换器和恒流电路等几部分组成。epr0m由可逆计数器的计数输出寻址;epr0m的输出经d/a转换器转换成模拟电压,并通过恒流电路向绕组供电。图6是一相驱动电路的电路图。恒流电路输出的电流流过与电机绕组串联的取样电阻r,在其上产生的压降与给定电压进行比较,形成强烈的电流负反馈,以此保证供给绕组电流
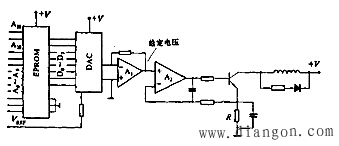
图6 一相驱动电路的电路图
的恒定。
给定电压大小由于 表1 为产生三相六拍4细分在eprom里存入的数字代码先存在bpro m里的致字代码决定。例如,为了产生图7所示的三相六拍4细分电流
波形,可在eprom里存入下列数字代码,见表1。

对于16细分或更多细分的数字代码也可以类似方式列出。epbom输出的数字代码经图6中的dac转换成相应的电流值,再通过运放a1转换成给定电压加到运放a2的“+”端。eprom输出的代码越大,加到a2的给定电压越大,流过电机绕组的电机为给定电压/r也越大。大代码0ffh产生额定电流;小于额定电流的驱动电流分别由00h、3fh、7fh和0bfh产生。
图7是以细分和调频调压两种方式驱动步进电机的原理图。若去掉上半部分,外加恒定电压,则成了纯粹的细分驱动控制电路。这时,微机输出的分相信号控制整步运动规律。微机的另一组输出控制每步中的细分。经d/a转换器将输出的数字量转换成为模拟量;经pwm电路变换成为输出频率固定但脉冲宽度可变的脉冲序列。微机输出的数值越大,则pwm输出的脉宽越宽,产生的相电流和电机转动的角度也越大。当微机输出大数据代码,或pwm输出宽脉冲时,步进电机将转动一个步距角。若微机输出的数据为大值的1/64、1/32或1/l6,则电机将以步距角的l/64、1/32或l/16的微步运动。若微机输出一串阶梯形

图6三相六拍4细分电流波形
数据(比如:以步距角θb的1/16为增量),则每次变化电机都将走θb/16微步。
图7的上半部分是调频调压驱动电路。微机输出的工作频率信号为f,经f/v转换器转换成为模拟电压v,并用这一电压控制pwm电路。pwm输出宽度 可变的脉冲用来控制dc/dc变换器中的开关接通和关闭,调整(再经滤波)向驱动电路供电的电压。工作频率越高,转换后的模拟
电压也越高;fwm输出的脉冲

图7 细分驱动和调频调压驱动电路框图
越宽,供应给驱动电路的电压越高。