





西门子6ES7217-1AG40-0XB0型号介绍
混合式步进由定子和转子组成。定于铁心与反应式步进电动机相同,每个极上有小齿和控制绕组。转子的结构与水久磁钢的电磁减速式相同。以两相混合式步进电动机为例,其结构原理如图1所示。

图1 混合式步进电动机结构原理图
a) s极性转子径向剖面图 b)轴向视图 c)n极性转子段径向剖面图
转子为对称的两段磁钢,轴向充电后,—段是n极,另一段是s极。定子对应转子也分两段,但实际上按一段处理,两段定子铁心上装有同一个两相对称控制绕组、如图1b)所示,
转子上均匀分布着小齿,定子上均匀分布着8个磁极,每个磁极上也有小齿,定于和转子上的齿宽和齿距严格相等,两段定子磁极铀向中心线应严格对齐,不允许产生任何错位。两段转子轴向中心线彼此错开半个齿距,定子上8个磁极每个磁极安装一个线圈,每个线圈贯通前后两段定子。8个线圈按一定方式连接,如图2所示,图中“*”表示同名端连接。1—3—5—7磁极上的绕组组成a相控制绕组,2—4—6—8磁极上的绕组组成b相控制绕组。当开关s1和s3闭合时,定子上的磁极1—3—5—7的极性为n—s—n—s,称为a相通正电。 当s2和s4闭合时,4个线圈中
的电流反向,磁极1—3—5—7上的极性为s—n—s—n,称为a相通负电。当相绕组中的开关s5和s7闭合时,2—4—6—8磁极的极性也为n—s—n—s,称为b相通正电。s6和s8闭合时,其极性也为s—x—s—n,称为b相通负电,如图1a)和c)所示。

图2 两相绕组接线图
设a相通正电时,转子位置为平衡位置。此时定子磁极1和5上的齿在a端与转子齿对齐,在b端与转子槽对齐,磁极3和7上的齿与b端上的转子齿及a端上的转子槽对齐,而b相4个极(2,4,6,8)上的齿与转子都错开1/4齿距,由于定子同一个极的两端极性相同,转子两端极性、但错开半个齿距,当转子偏离平衡位置时、两端作用转矩的方向是一致的。在同一端,定子个与第三个极的极性转子同—端极性相同,但极和第三极下定、转子小齿的相对位置错开了半个齿距,作用转矩的方向也是一致的。
当给电动机定子各相绕组以a正→b正→a负→b负→a正的顺序轮流循环加直流电脉冲时,由于电动机的上述错齿结构和线圈连接方式,迫使转子以1/4齿距的齿距角沿某一方向运转。
(1)步距角及步距误差步距角是步进的一项重要性能指标,它直接关系到进给伺服系统的定位精度,选择电动机也要选择步距角。步进电动机的实际步距角与理论步距角之间有误差,步距误差指一转内误差的大值。影响步距误差的因素主要是齿和磁极的机械加上及装配精度。步进电动机通、断电一次,转过一个步距角。累积误差是指转子从任意位置开始,经任意步后,转子的实际转角与理论转角之差的大值。转一周积累误差为零。步距误差通常为理论步距角的5%。

图1 步进电动机距角特性
(2)静态矩角特性和大静转矩当步进电动机某相通电时,转子上受到的电磁转矩t称为静态转处于不动状态,这时转子上无转矩输出。如果在电动机轴上加一个负载转矩,转子按一定方向转过一个角度θ,重新处于不动(稳定状态),这时转子矩。它与负载转矩相等,转过的角度θ称为失调角,静态时t均θ的关系称为矩角特性,它近似于正正弦曲线。图1给出了单相距角特。
特性曲线上的电磁转矩大值称为大静转矩。在静态稳定区域内,当外转矩除去后,转子在电磁转矩的作用下.仍能回到稳定平衡点位置。大静转矩表示步进电动机承受负载的能力。它越大,机带负载能力越强。运行的快速性和稳定性越好。
(3)大起动转矩电动机相邻两相的静态矩角特征曲线交点所对应的转矩即为大起动转矩。当外界负载超过大起功转矩时,步进电动机就不能起动,如图2所示。

图2 步进电动机大起动转矩
(4)大起动频率空载时,步进电动机由静止状态起动、达到不丢步的正常运行的高频串称为大起动频率。它是步进电动机快速性能的重要指标。—般来说.负载转矩和转动惯量增加,起动频率下降。
(5)连续运行频率步进电动机在大起功频率以下起动后,当输入脉冲信号频率连续上升时,能不失步运行的大输入信号频率,称为连续远行频率,该频率远大于大起动频率。
1、步距角精度:每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步:电机运转时运转的步数,不等于理论上的步数。称之为失步。
3、失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的大频率。
5、大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的高转速频率。
6、运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中重要的,也是电机选择的根本依据。
其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,步进电机输出力矩越大,即电机的频率特性越硬。
交流伺服就是两相,它的定子上有空间相差90°电角度的两相分布绕组,一相为励磁绕组f,一相为控制绕组k,转子为笼形。电动机工作时,励磁绕组f接单相交流电压uf,控制绕组接控制信号电压uk,uf与uk两者同频率。交流伺服机必须象直流伺服机一样具有伺服性,即控制信号电压强时,电动机转速高;控制信号电压弱时,电动机转速低;若控制信号电压等于零,电动机就应该不转了。为了满足信号电压强时转速高、信号电压弱时转速低这一要求,可以让信号强时电机气隙磁通势接近圆形旋转磁通势,弱时椭圆度大接近脉振磁通势就行。而对于要求信号电压消失,即uk=0后,电动机不转必须采用相应技术措施才能实现。
我们知道,单相异步电动机定子若只有一相绕组通电时,其机械行性为过点
t=0,n=0)的对称曲线,在其正转电磁转矩特性曲线t+=f(s),t+=tm+时的临界转差率sm+<1,t-=f(s)与t+=f(s)对称,0<n<n0 (n0为理想空载转速,n0<n1),合成转矩t>0;而0>n>-n,合成转矩t<0。如果交流伺服电动机的定子绕组与一般单相异步电动机的一样,那么正在运行的交流伺服电动机的控制信号电压一旦变为零,电机就运行于只有励磁绕组—相通电的情况下,那么电机还必然在原来的旋转方向上继续旋转,只是转速略有下降,但绝不可能停下来。这种信号电压消失后电动机仍然旋转不停的现象称为自转,自转现象破坏了伺服性,显然是要避免的。那么交流伺服电动机怎样避免单相运行时的自转呢? 可以看—下图1中所示的机械特性,这也是只一相绕组通电时的机械持性,其正转电磁转矩特性曲线 t+=f(s),t+=tm+”时的临界转差率sm+=l,t+=f(s)与t-=f(s)对称。电机总的电磁转矩持性t=f(s)具有这样的特点:①过零,无起动转矩;②0<n<n1时,t<0,是制动性转矩;o>n>- n1时,t>o,也是制动件转矩。在这种情况下,本来运转的交流伺服机.若控制信号电压消失后,由于一相绕组通电运行时的电磁转矩是制动性的,电动机转速将被制动到n=0,只要sm+>1,就能避免自转现象。

图1 交流伺服电动机自转现象的避免
实际的交流伺服电动机,需要正转磁通势(或反转磁通势)单独作用时的sm很大。加大sm的方法是增大转子回路的电阻r2。因为sm∝r2,交流伺服电动机转子电阻相对于一般异步电动机来说是很大的。
设计交流伺服电动机时,当励磁绕组与控制绕组分别为额定值大小时(对控制绕组来讲,额定电压指大的控制电压),两绕组产生的磁通势幅值也一样大。交流伺服电动机运行时,励磁绕组如果接在额定电压上,大小、相位都不变,那么改变控制绕组所加的电压uk的大小和相位,电动机气隙磁通势则随着信号电压uk的大小和相位而改变,有可能为圆形旋转磁通势,有可能为不同椭圆度的椭圆旋转磁通势,也有可能为脉振磁通势。(版权所有 )而由于气隙磁通势的不同,电动机机械特性也相应改变,那么拖动着负载运行的交流伺服电动机的转速n也就随之变化了。这就是交流伺服电动机利用控制信号电压uk的大小和相位的变化,控制转速随之变化的道理。
改变uk的大小与相位即实现对交流伺服电动机的控制,控制方法主要有三种:幅值控制、相位控制和幅值—相位控制。
1.幅值理制
由加在控制绕组上信号电压的幅值大小来控制交流伺服电动机转速,这种控制方式称为幅值控制。
幅值控制接线如图2所示。励磁绕组f直接接交流。电压大小为额定值。控制绕组所加的电压为uk,其相位与励磁绕组电压相差90°,如落后90°,uk大小可以改变。uk的大小为uk=αukn,ukn为控制绕组额定电压, α称为有效信号系数,α大值为1。若以
ukn为基恒,控制信号电压uk 的标么值是α,即: uk /ukn= uk=α
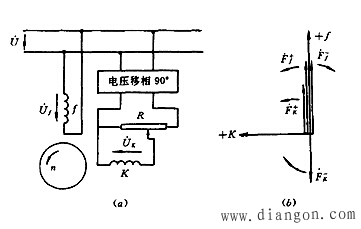
图2 交流伺服电动机帽值控制
(a)控制接线图 (b) ff大瞬间
若有效信号系数α≠1,控制绕组磁通势幅值与励磁绕组磁通势幅值不一样大,而两绕组空间相差90°电角度,所加电压及所通电流时间相差90。电角度,电机总的气隙合成磁通势为椭圆形旋转磁通势,空间磁通势向量图如图2 (b)所示。该图中ff+与ff-为励磁绕组脉振磁通势ff分解成的两个正、反旋转磁通势;fk+与fk-为控制绕组脉振磁通势fk分解成的两个正、反旋转磁通势;电机内正转磁通势为f+=ff++fk+,反转磁通势f-=ff-+fk-,这是一般的情况。当α=1时,ff=fk,f+=2 ff+,f-=0。气隙磁通势f=f+,为圆磁通势;当α=0时,fk=0,气隙磁通势f=ff+为脉振磁通,f+=f-=ff/2;而0<α<1时,气隙中f+=ff++fk+,f-=ff-+fk-,为椭圆磁通势。α值越小,椭圆度越大,越接近脉振磁通势。
采用分析单相异步电动机两相绕组通电时的同样方法,正转磁通势与反转磁通势分别产生电磁转矩t+与t-,总的电磁转矩t=t++t-。后可以得出有效信号系数α为不同值时相应的机械待性,如图3(a)所示。该图中,电磁转矩与转 速都采用标么值,转
矩的基值是α=1圆形磁通势时电机的起动转矩,转速的基值是同步转速n1。机械特性不是直线。从图1-35所示的机械特性看出,有效信号系 数α=1时,气隙磁通势为圆磁通势,f-=0,t-=0,在一定的转速下电磁转矩t=t+大。α<1时,正转磁通势f+减小,t+减小反转磁通势f-出现,t-≠0,在一定转速下电磁转矩t= t++ t-,比α=1时小。而α=0,正转磁通势f+与反转磁通势f-大小相等,机械特性t=f(s)如图1=33所示。在图l-35(a)中则过原点不在第ⅰ象限内。还可以看出,α=1时,理想空载转速为同步转速n0;而α<1时,由于t-存在,使得理想空载转速小于n0,道理与单相异步电动机相同。α越小,理想空载转速越低。机械特性中,在0<α<1整个范围内,起动转矩的标么值ts=α。
交流伺服电动机幅值控制时的调节特性也可以从机械特性得到的,如图3(b)所示。幅值控制时调节特性也不是直线,只在n较小时近似为直线。为了尽量使交流伺服电动机调节特性用在n较小的区域,以保证伺服系统的动态误差较小,许多交流伺服电动机采用频率为400hz的交流电源,提高它的同步转速n0。与直流伺服电动机相似,调节特性与横抽交点的有效信号系数α的值为始动电压的标么值,转矩大时,始动电压高,始动电压与转矩二者标么值的数值相等。

(a)机械特性 (b) 调节特性
图3 幅值控制时的机械特性与调节特性
交流伺服电动机输出功率p2=t2ω≈tω,在一定的控制信号电压下,若转速很低,由于ω很小,输出功率p2也很小;若转速接近于理想空载转速时,由于t很小,输出功率也很小。α越大,输出的功率也越大。交流伺服电动机的额定功率通常规定为当α=1时的大输出功率,此时相应的转速则为额定转速,相应的输出转矩则为额定转矩,与一般电动机的规定方法是不一样的。
2.相位控制
由加在控制绕组上的信号电压的相位来控制交流伺服电动机转速的控制方式称为相位控制。相位控制接线如图4所示。励磁绕组接在交流电源上,大小为额定电压,控制绕组所加信号电压的大小为额定值,相位可以改变。uf与uk是同频率的,二者相位差为β,β=0~90°,例如uk落后于uf。这样sinβ=0~ 1,sinβ称为相位控制的信号系数。

图4相位控制 图5 幅值-相位控制
3.幅值-相位控制
交流伺服电动机幅值-相位控制接线如图5所示。励磁绕组外边串器后再接交流电源,控制电压为uk,uk与电源电压同频率、同相位.大小可以改变。
相位控制、幅值-相位控制的交流伺服电动机的控制信号变化时,电机内合成磁通势的性质或椭圆度也随之改变,从而具有不同的机械特性,使电机具有伺服性。这两种控制方法的机械特性和调节特