





西门子6ES7215-1BG40-0XB0型号介绍
的功率,应根据生产机械所需要的功率来选择,尽量使电机在额定负载下运行。选择时应注意以下两点:
1、如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载.使其绝缘因发热而损坏.甚至电机被烧毁。
2、如果电机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。还会造成电能浪费。
要正确选择电机的功率,必须经过以下计算或比较:
p=f*v /1000 (p=计算功率kw,f=所需拉力n,工作机线速度m/s)
对于恒定负载连续工作方式,可按下式计算所需电机的功率:
p1(kw):p=p/n1n2
式中n1为生产机械的效率;n2为电机的效率,即传动效率。
按上式求出的功率p1,不一定与产品功率相同。.所选电机的额定功率应等于或稍大于计算所得的功率。
.常用的是类比法来选择电机的功率。所谓类比法。就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。
验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大.则表明所选电机的功率 合适。如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。
实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。
即t = 9550p/n
式中:
p— 功率,kw;
n— 电机的额定转速,r/min;
t— 转矩,nm。
电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。
机械功率公式:p=txn/97500
p:功率单位w
t:转矩,单位克/㎝
n:转速,单位r/min
驱动器三种基本的驱动模式:整步、半步、细分。其主要区别在于电机线圈电流的控制精度(即激磁方式)。通常步进电机都有低频振动的特点,通过细分调协可以改善电机低速动运行的平衡性。下面学习网小编给大家详细介绍一下:
1、整步驱动
在整步运行中,同一种步进电机既可配整/半步驱动器也可配细分驱动器,但运行效果不同。步进电机驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度 (标准两相电机的一圈共有200个步距角)。
2、半步驱动
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。如此循环地对两相线圈进行单相双相激磁步进电机将以每个脉冲0.90度的半步方式转动。所有步进电机的整/半步驱动器都可以执行整步和半步驱动,由驱动器拨码开关的拨位进行选择。和整步方式相比,半步方式具有精度高一倍和低速运行时振动较小的优点,实际使用整/半步驱动器时一般选用半步模式。
3、细分驱动
细分驱动模式具有低速振动极小和定位精度高两大优点。对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于0.90度的步进应用中,细分驱动器获得广泛应用。
其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。例如十六细分的驱动方式可使每圈200标准步的步进电机达到每圈200*16=3200步的运行精度(即0.1125°)。
增量式角度数字编码器的工作原理:

(图片文字依次为:光源、码盘、光敏元件、放大整形、脉冲输出)
在一个码盘的边缘上开有相等角度的缝隙(分为透明和不透明部分),在开缝码盘两边分别安装光源及光敏元件。当码盘随工作轴一起转动时,每转过一个缝隙就产生一次光线的明暗变化,再经整形放大,可以得到一定幅值和功率的电脉冲输出信号,脉冲数就等于转过的缝隙数。将该脉冲信号送到计数器中去进行计数,从测得的数码数就能知道码盘转过的角度。
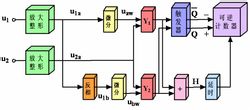
为了判断旋转方向 ,可以采用两套光电转换装置。令它们在空间的相对位置有一定的关系,从而保证它们产生的信号在 相位上相差1/4周期。
增量型编码器通过内部两个光敏接受管将编码器的转向转化为a相和b相脉冲的时序和相位关系。编码器每转还输出一个z相脉冲以代表零位参考位。
如图所示,a、b 两点对应两个光敏接受管,a、b 两点间距为 s2,编码器的光栅间距分别为s0 和s1。

当编码器以某个速度匀速转动时,输出波形中的s0:s1:s2 比值与实际编码器的s0:s1:s2相同。如果编码器做变速运动,可以把它看成为多个运动周期的组合,那么每个运动周期输出波形的s0:s1:s2 比值与实际编码器的s0:s1:s2仍相同。
通过输出波形可知每个运动周期的时序为

我们把当前的a,b 输出值保存下来,与下一个a,b 输出值做比较,就可以得出编码器的运动方向。用编码器运动角位移除以所消耗的时间,就得到编码器运动的角速度。
如果s0=s1,且s2=s0/2,1/4个运动周期就可以得到运动方向和位移角度,否则要1个运动周期才可以得到运动方向和位移角度。
综上可知,可以通过判断a相和b相的相位关系来判断编码器的正反转,通过z相脉冲获得零位参考位。
关于增量型编码器的一些技术参数如下:
分辨率:编码器每转提供的通或暗的刻线数叫分辨率,也称解析分度或直接称多少线。一般每转分度5~10000线。
信号输出:信号输出形式有正弦波(电流或电压)、方波(ttl/htl)等多种。其中ttl方波的形式为长线差分信号(对称a+、a-;b+、b-;z+、z-)。
信号连接:编码器的脉冲信号一般连接计数器、、计算机。形式有单相连接(用于单方向测速、计数);ab两相连接(用于双向测速、计数及判断方向);abz三相连接(用于带参考位修正的位置测量);差分连接(用于远距离传输)。
增量型编码器在角度测量和角速度测量中较型编码器具有廉价和简易的优点。但存在抗干扰能力较差、有零点累计误差、接受设备停机需断电记忆,开机需找参考位等问题。一般应用在测速、测转动方向、测移动角度、测相对距离等方面。
电压影响速度,电流影响力矩。
的矩频特性,都是在某一特定电流电压下测试的数据,当电流电压发生变化,其矩频特性也会发生相应变化。
举例来说:适用电压波动范围比较大的85电机来说,从24v到220v的驱动器都可以适用,fy86ec502a力矩为6n.m,这是在dc80v