6ES7331-7KB02-0AB0
绕线常用一般工具:克丝钳、剪刀、扳手、卡尺
3.4 检查工具和仪器:千分尺、匝数仪。
3.5 工位器具.
4. 工艺准备
4.1 准备线圈绕制所需的技术文件和材料及绕线所需工具
4.2 检查导线线径,并将导线线盘装置在搁线架上(常用漆包铜圆线参数见附表)。
4.3 检查线模尺寸,并将其装置在绕线机的主轴上。
4.4 试车运转:调整绕线机转速,校对计数器并调至零位
4.5 将漆包铜圆线端头缠绕固定在绕线机主轴上,拉紧漆包铜圆线到合适紧度(使漆包线拉直,且不致使漆包线拉细和破坏绝缘为宜)。
5. 工艺过程
5.1 将导线的始端按规定留出适当长度,固定在绕线模特制的柱销上。
5.3留出连接线,按同样的方法绕制其余线圈。
5.4 按规定的长度留出末端引线,并剪断导线。
5.5 拆下绕线模,逐个取出线圈,并在线圈上下两端进行帮扎。
5.6 按5.1~5.5条将整台电机绕组绕制完成,并经过匝数仪检验后帮扎好,整齐的放在存放线圈的工位器具内。
电机绕线方法
6. 质量检查
6.1 每批绕制好线圈的必须按有关技术文件检查合格后方可投入生产。
6.2 在正常生产中应检查下列项目
6.2.1 用匝数试验仪检查每只线圈的匝数应符合图样要求。
6.2.1 导线的接头数在每只线圈中不得超过一处,每相线圈中不得超过两处,每台电机不得超过四处,接头必须在端部斜边处,其包扎应符合7.1条的规定。
6.2.3 工位器具内的线圈应排列整齐不得损伤绝缘。
7. 技术安全及注意事项
7.1 绕线中发现导线长度不够或断线现象时,允许焊接,但必须遵守下列规定。
7.1.1 接头位置只允许在线圈的端部斜边。
7.1.2 焊接应保证接触良好,有足够的机械强度,表面光洁。
7.1.3 接头处绝缘套管长度较导线绝缘重叠部分应大于15mm。
7.2 绕线时应仔细观察导线,如有绝缘损伤处,按7.1.1~7.1.3规定执行,但每只线圈不得超过一处,每相线圈不得超过两处。
7.3 绕好的线圈应整齐地放置在清洁的工位器具内,其堆放高度不得超过0.5m, 不允许有压弯变形现象。
7.4 每换一盘导线时需检查线规,合格后才可使用。
7.5 绕线机应有可靠的接地保护装置。
第二部 异步电机绕组的嵌线方法
异步电机绕组的嵌线方法
(一)放置槽绝缘
将已裁剪好的槽绝缘纸纵向摺成"U"形插入槽中,绝缘纸光面向里,便于向槽内嵌线。
(二)线圈的整理
1.缩宽
用两手的拇指和食指分别拉压线圈直线转角部位,将线圈宽度压缩到能进入定子内膛而不碰触铁心。也可将线圈横立并垂直于台面,用双手扶着线圈向下压缩。
2.扭转
解开欲嵌放线圈有效边的扎线,左手拇指和食指捏住直线边靠转角处,同样用右手指捏住上层边相应部位,将两边同向扭转,使线圈边导线扭向一面。
3.捏扁
将右手移到下层边与左手配合,尽量将下层直线边靠转角处捏扁,左手不动,右手指边捏边向下搓,使下层边梳理成扁平的刀状。
异步电机绕组的嵌线方法
如扁平度不够可多搓捏几次。线圈的捏扁梳理示意
西门子6ES7315-2AH14-0AB0型号规格
siemens定位器固定在如分流挡板、猛烈振荡或振动的阀门,或蒸汽喷射装置上会受到强加速力的作用,在情况下,会导致摩擦配合的移位。为了应对这一状况,我们可以选择带加强摩擦配合的定位器。
siemens定位器在强大和持续的振动,高的或太低的环境温度,核辐射这种情况下上述的措施是不可行的。对于这种情况,位置传感器和控制单元分开安装是非常有好处的。为此,有适用于直线和旋转型执行器的通用组件,主要是以下几种:
1.位置传感器单元:由带有综合摩擦配合的SIPART PS2外壳、内置电位器,和各种盲塞和密封件组成。
2.控制单元,各种型号的siemens定位器。
3.与电缆卡和M-20电缆格尽头成套的EMC过滤器板可以使用。EMC过滤器板必须要安装在siemens定位器上。与EMC过滤器--起提供的安装说明介绍了组件的组装。
4.三芯电缆连接到组件:当用电位器(电阻值为10K8)代替位置传感器单元,安装在执行器上时,对于控制单元必须要使用这些改进的组件
siemens定位器可以连接HART通信、Profibus和FF总线通信的等多种通讯方式,根据不同的通讯方式,在线更换定位器的步骤也会有所不同,下面我们看看基于HART通信的siemens定位器是如何更换的。
1)获取要被更换的siemens定位器的数据参数。
2)用机械或气动的方法把执行机构固定在当前位置(Keep in Place)。
3)读取并纪录被更换的siemens定位器显示值。如果已经失电,则记录当前实际阀位。
4)拆卸siemens定位器。在新定位器上安装所有附件,把新定位器安装到调节阀上。
5)接通仪表信号,调节调整轮,使新定位器液晶显示的阀位置与记录数值相符。
6)取下机械锁定装置。新安装的siemens定位器可以投运了。
完成以上操作后,建议把siemens定位器的参数预先备份在系统中或笔记本中,方便下一次的操作
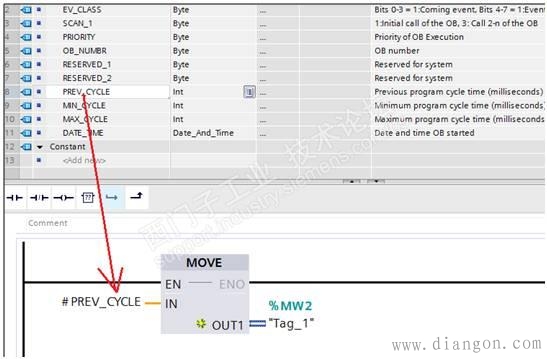
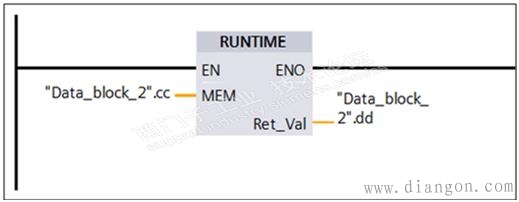
| 读出S7-1500 CPU的运行时间有多种方式,下面分别介绍这几种方式。 1.通过OB1的启动参数读出运行时间在非优化的OB1启动信息中带有OB1的运行时间,如图1所示。
|