6ES7322-1BH10-0AA0
步进电机是将脉冲信号转换为角位移或线位移。
一是过载性好。其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,步进电机使用时对速度和位置都有严格要求。
二是控制方便。步进电机是以“步"为单位旋转的,数字特征比较明显。
三是整机结构简单。传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电机后,使得整机的结构变得简单和紧凑。测速电机是将转速转换成电压,并传递到输入端作为反馈信号。测速电机为一种辅助型电机,在普通直流电机的尾端安装测速电机,通过测速电机所产生的电压反馈给直流电源,来达到控制直流电机转速的目的1、步进电机减速器应牢固地安装在稳定水平的基础或底座上,排油槽的油应能排除,且冷却空气循环流 畅。基础不可靠,运转时会引起振动及噪声,并促使轴承及齿轮受损。当传动联接件有突出 物或采用齿轮、链轮传动时,应考虑加装防护装置,输出轴上承受较大的径向载荷时,应选用加强型。
2、 按规定的安装装置保证工作人员能方便地靠近油标,通气塞、排油塞。安装就位后,应按次 序全面检查安装位置的准确性,各紧固件压紧的可靠性, 安装后应能灵活转动。步进电机减速器采用油池飞溅润滑,在运行前用户需将通气孔的螺塞取下, 换上通气塞。按不同的安装位置,并打开油位塞螺钉检查油位线的高度,从油位塞处加油至润滑油从油位塞螺孔溢出为止,拧上 油位塞确定无误后,方可进行空载试运转, 时间不得少于2小时。运转应平稳,无冲击、振动、杂音及渗漏油现象,发现异常应及时排除。经过一定时期应再检查油位,以防止机壳可能造成的泄漏,如环境温度过高或过低时,可改变润滑油的牌号。
3、安装步进电机减速器时,应重视传动中心轴线对中,其误差不得大于所用联轴器的使用补偿量。对中良好能延长使用寿命,并获得理想的传动效率。
4、在输出轴上安装传动件时,不允许 用锤子敲击,通常利用装配夹具和轴端的内螺纹,用螺栓将传动件压入,否则有可能造成步进电机减速器内部零件的损坏。好不采用钢性固定式联轴器,因该类联轴器安装不当,会 引起不必要的外加载荷,以致造成轴承的早期损坏,严重时甚至造成输出轴的断裂
6ES7314-6BH04-0AB0安装调试
BCNet-S7 PPI/MPI可以通过Internet远程通讯的方式,实现西门子PLC设备的编程、诊断以及数据通讯。我们以ADSL(VPN通道)的方式为例,构建远程通讯系统。
系统配置图:

所需硬件:两根线,两个ADSL的modem,两个宽带路由器(带VPN及DDNS功能,如:TL-R400VPN),一个工程师站(ES),一个PLC站,一个BCNet-S7 PPI/MPI模块。
一、VPN路由器的设置(以本地路由器为例)
1、网络参数设置
1)将网线连接至路由器的WAN口,在 IE 浏览器中输入路由器的IP 地址(默认:) ,键入用户名和密码(默认为 admin);

2)成功登录后会弹出一个设置向导的画面(如果没有自动弹出,可以单击管理员模式画面左边“设置向导"菜单),单击“下一步",进入上网方式选择画面;

3)选择上网方式为 PPPoE,(ADSL虚拟拨号),单击“下一步";

4)填入ISP提供的上网帐号和口令,单击“下一步";

5)单击“完成";

6)选择菜单“网路参数—LAN口设置",选择需要的网段(如:)

2、VPN通道设置
在启动和登录成功以后,我们进行VPN的连接,在“VPN"菜单下,有“IKE"、“IPsec"和“安全联盟列表"三个子项。
1)IKE 设置:
点击“IKE"菜单,进入IKE 安全策略条目设置界面:

设置完后,IKE安全策略列表中会出现信息条目:

注意:两边的IKE设置要确保一致。
2)IPsec设置:
点击“IPsec"菜单,进入IPsec 安全策略条目设置界面:

设置完后,IPsec安全策略列表中会出现信息条目:

3)点击“联盟列表"菜单,此时在联盟列表中会出现一对VPN通道连接:

3、动态DNS参数设置
TL-R400VPN路由器,使用的是花生壳动态域名解析服务器,注册域名,将域名信息填入:

完成本地路由器的设置。
4、远程路由器的设置方法和本地路由器类似:
注意:两边的IKE设置要确保一致。
二、BCNet-S7模块参数设置(以BCNet-S7PPI为例)
1、BCNet-S7PPI参数设置,将IP设在路由器的网段上;

2、远程软件访问(以西门子S7200编程软件MicroWIN为例)
1)打开MicroWIN,设置 PG/PC 接口,指向计算机网卡;

2)点击“通信",填入 BCNer-S7PPI 的 IP 地址(91),保存;

3)“双击刷新",找到plc,点击“确定"

这样就可以通过Internet对远程的西门子PLC进行程序上下载、诊断和通讯了。
3、远程软件访问(BCNet-S7PPI/MPI可以通过“BCNetPro-BCNet通讯测试"测试通讯)

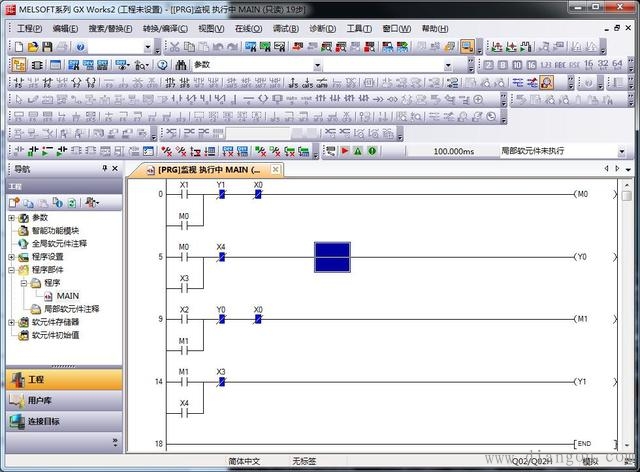
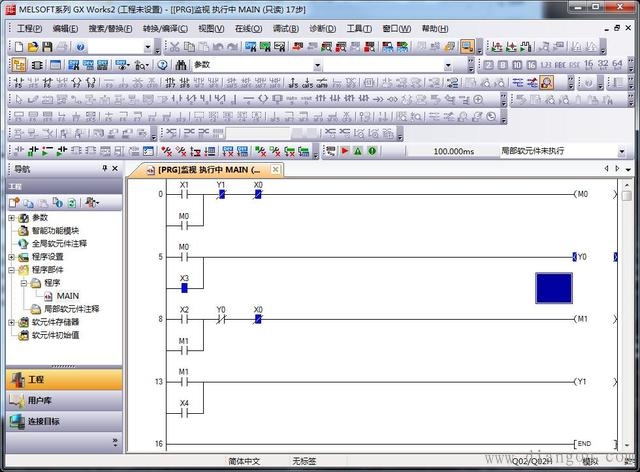
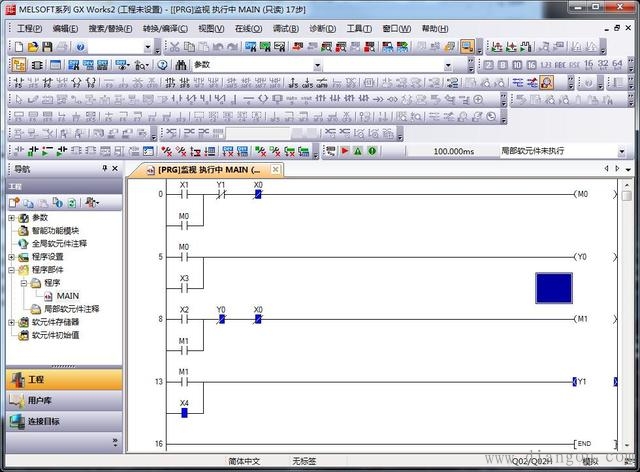
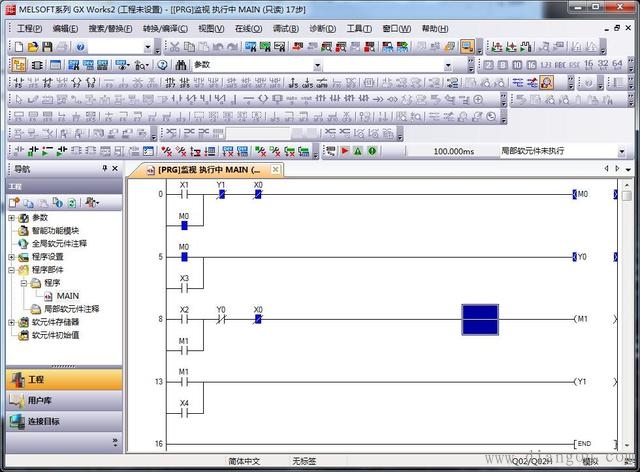
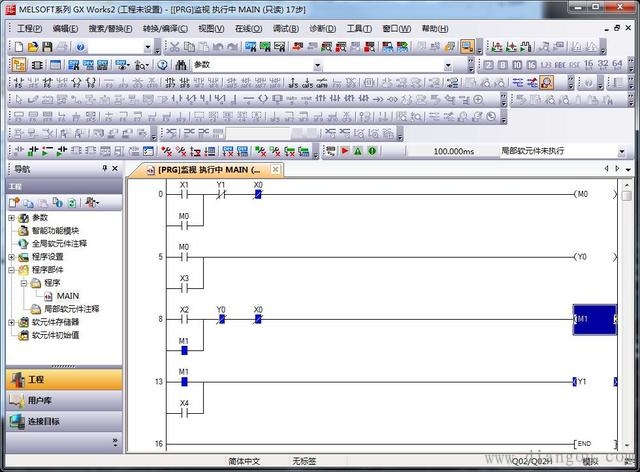
| 给大家介绍正反转控制吧!喜欢就收藏,点赞,转发吧!谢谢 要求:1.能够正反点动电机。 2.能够选择正转,反转电机。 3.能够停止电机。 挺简单的一个正反转,能够带大家入门了解了。 我们分析下程序的要求,可以得知,需要输入点5个 输出点2个 分别如下分配: 输入点:X0 急停 X1正转启动 X2反转启动 X3正转点动 X4反转点动 输出点:Y0输出正转 Y1输出反转 分配好输入输出点后我们就开始我们的梯形图编写,编写完成后如下:
|