6ES7512-1CK01-0AB0安装调试
西门子的TIA(全集成自动化)的概念可以说是建立在通信的基础上的,无论是Profibus还是Profinet,或者是Asi甚至是Wireless,各种通讯形式将不同的分系统联系起来,从而组成了完整的TIA控制系统,而其中所用到的服务和协议,可以想象也是非常繁多的。
ISO/OSI模型中层面不同,协议也不同,s7属于顶层也就是应用层协议,可加载ISO,ISO ON TCP、MPI、PROFIBUS等网络上。
TCP和ISO/OSI的区别和联系:严格的说,这两者都不是单个协议,而是一个协议集合。ISO是化组织的简称,OSI是由其推出的开放式网络系统的一个框架,就像一个文件柜,共有七个抽屉,由下向上共分为物理层、链路层、网络层、传输层、表示层、会话层、应用层。这是一个的指导框架,各厂商生产适合装放在相应的抽屉中产品。
而TCP是事实存在的一种网框架,是分了四个抽屉的文件柜,分别是网络接口层(相当于OSI的物理层和链路层)、网络层、传输层、应用层。这是先于OSI出现的框架,是绝大多数厂商遵守的标准,应用为广泛。
两者并不矛盾,OSI是理论上的一种结构,有助于对网络及通信规程的认知,而TCP实际上也是在此框架上的一种广泛应用事实结构。都对各厂家的上下层软硬件产品相互兼容起到了决定性作用。
例如我们西门子设备的通信,网络接口层有串行通信,采用RS422/RS485标准(注意不是网络协议,这是电气规程约定)和以太网通信,采用Ethernet 802.3标准。在传输层上可以使用PORFIBUS、MPI、MDBUS等网络协议。而在以太网结构上可以使用TCP/IP、SNMP、FTP、HTTP等网络协议。STEP7、TIA实际上就是集成了这些协议的应用层程序。不同的子网一般情况下是不互通的,如果要建立通信,那就要在网络层上做路由并要设定接口网关才可通信。
S7通信和S5兼容通信的区别。如果多个西门子PLC通信,采用S7兼容通信更合适一些。Profibus_s7应该是西门子一种优化的通讯解决方案,我们是上位机厂家,一般和300/400PLC通讯时,如果个MPI口被占用时,往往需要使用DP口进行通讯 ,这时基于Profibus总线的Profibus_s7通讯就是一种的方案了,他是真正的主-主通讯,使用的是1,2,7层,通讯简单快速有效。
S7-300/400PLC之间的Profibus_s7通讯可以调用库里的块,上位机和Profibus_s7通讯 采用的应该是类似调库的方式,上位机通过applicaion和S7_connection这些参数建立的初始化。前提是需要在step7组态时组好pc station的虚拟站点。
Profbus网络et200m和hmi可以使用同一种协议,例如DP,但HMI需要配置Direct key。也常常使用不同的协议,前者是Dp,后者是S7。一起通信在于Profibus总线通信的设置呀,一种是循环的通信Dp,另一种是肺循环的通信S7。两者从通信速度上说是一样的,因为在一根总线是12M。而效率却不同,一次循环可以和IO进行了通信,一次循环却未必和HMI尚的IO进行全部通信,可能需要几个周期
振动烈度是振动速度的均方根值(频率范围 10 - 1000 Hz)。振动烈度是使用符合 DIN 45666 的电气测量仪表测量的。
仪表所指示的值仅针对电机。这些值会随着整个系统因安装引发的振动行为而增加。

轴高 20 至 132 的振动烈度限值
转速 1800 rpm 和 3600 rpm 以及相关限值是根据 IEC 定义的。4500 rpm 和 6000 rpm 的转速以及值是由电机制造商定义的。
电机达到额定转速前将维持振动烈度等级 A。

轴高 的振动烈度限值
符合 ISO 8821 的平衡(不适用于 SIMOTICS 电机 M-1FE、L-1FN3 和 T-1FW6)带有附加带轮的电机的振动质量,除了电机平衡质量外,主要由所安装组件的平衡状态决定。
如果电机和所安装组件在接合前是独立平衡的,则带轮的平衡过程要与电机的平衡类型相匹配。SIMOTICS M-1PH8 型号的电机可使用以下几种不同的平衡方法:
半键平衡
全键平衡
光轴轴伸
SIMOTICS M-1PH8 电机的轴伸表面印有字母 H(半键)或 F(全键),表示该电机采用半键平衡或全键平衡。
带导向键的 SIMOTICS S-1FT7/1FK7 电机始终采用半键平衡。
通常,对于振动质量要求极其严格的系统,建议采用带光轴的电机。对于全键平衡的电机,建议使用带两个反向键槽的皮带轮,但在轴伸中只能有一个滑键。
振动应力,所产生的振动值(不适用于 SIMOTICS 电机 M-1FE、L-1FN3 和 T-1FW6)在全面功能下的下列大允许振动应力限值仅适用于 SIMOTICS S-1FK7/S-1FT7 永磁伺服电机和 SIMOTICS T-1FW3 转矩电机。
1、 开关量也称逻辑量,指仅有两个取值,0或1、ON或OFF。它是常用的控制,对它进行控制是plc的优势,也是PLC基本的应用。
开关量控制的目的是,根据开关量的当前输入组合与历史的输入顺序,使PLC产生相应的开关量输出,以使系统能按一定的顺序工作。有时也称其为顺序控制。
而顺序控制又分为手动、半自动或自动。而采用的控制原则有分散、集中与混合控制三种。
2、 模拟量是指一些连续变化的物理量,如电压、电流、压力、速度、流量等。
PLC是由继电控制引入微处理技术后发展而来的,可方便及可靠地用于开关量控制。由于模拟量可转换成数字量,数字量只是多位的开关量,故经转换后的模拟量,PLC也完全可以可靠的进行处理控制。
由于连续的生产过程常有模拟量,模拟量控制有时也称过程控制。
模拟量多是非电量,而PLC只能处理数字量、电量。所有要实现它们之间的转换要有传感器,把模拟量转换成数电量。如果这一电量不是标准的,还要经过变送器,把非标准的电量变成标准的电信号,如4—20mA、1—5V、0—10V等等。
还要有模拟量输入单元(A/D),把这些标准的电信号变换成数字信号;模拟量输出单元(D/A),以把PLC处理后的数字量变换成模拟量——标准的电信号。
标准电信号、数字量之间的转换就要用到各种运算。这就需要搞清楚模拟量单元的分辨率以及标准的电信号。例如:
PLC模拟单元的分辨率是1/32767,对应的标准电量是0—10V,所要检测的是温度值0—100℃。那么0—32767对应0—100℃的温度值。计算出1℃所对应的数字量是327.67。如果想把温度值**到0.1℃,把327.67/10即可。
模拟量控制包括:反馈控制、前馈控制、比例控制、模糊控制等。这些都是PLC内部数字量的计算过程。
3、 脉冲量是其取值总是不断的在0(低电平)和1(高电平)之间交替变化的数字量。每秒钟脉冲交替变化的次数称为频率。
PLC脉冲量的控制目的主要是位置控制、运动控制、轨迹控制等。例如:脉冲数在角度控制中的应用。步进电机驱动器的细分是每圈10000,要求步进电机旋转90度。那么所要动作的脉冲数值=10000/(360/90)=2500。
模拟量的计算
1、-10—10V。-10V—10V的电压时,在6000分辨率时被转换为F448—0BB8Hex(-3000—3000);12000分辨率时被转换为E890—1770Hex(-6000—6000)。
2、 0—10V。0—10V的电压时,在12000分辨率时被转换为0—1770Hex(0—6000);12000分辨率时被转换为0—2EE0Hex(0—12000)。
3、 0—20mA。0—20mA的电流时,在6000分辨率时被转换为0—1770Hex(0—6000);12000分辨率时被转换为0—2EE0Hex(0—12000)。
4、 4—20mA。4—20mA的电流时,在6000分辨率时被转换为0—1770Hex(0—6000);12000分辨率时被转换为0—2EE0Hex(0—12000)。
以上仅做简单的介绍,不同的PLC有不同的分辨率,并且您所测量物理量实现的量程不一样。计算结果可能有一定的差异。
注:模拟输入的配线的要求:
1、使用屏蔽双绞线,但不连接屏蔽层。
2、当一个输入不使用的时候,将V IN 和COM端子短接。
3、模拟信号线与电源线隔离 (AC 电源线,高压线等)。
4、当电源线上有干扰时,在输入部分和电源单元之间安装一个虑波器。
5、确认正确的接线后,给CPU单元上电,再给负载上电。
6、断电时先切断负载的电源,再切断CPU的电源。
脉冲量的计算
脉冲量的控制多用于步进电机、伺服电机的角度控制、距离控制、位置控制等。以下是以步进电机为例来说明各控制方式。
1、 步进电机的角度控制。要明确步进电机的细分数,确定步进电机转一圈所需要的总脉冲数。计算“角度百分比=设定角度/360°(即一圈)”“角度动作脉冲数=一圈总脉冲数*角度百分比。”
公式为:角度动作脉冲数=一圈总脉冲数*(设定角度/360°)。
2、 步进电机的距离控制。明确步进电机转一圈所需要的总脉冲数。确定步进电机滚轮直径,计算滚轮周长。计算每一脉冲运行距离。后计算设定距离所要运行的脉冲数。
公式为:设定距离脉冲数=设定距离/[(滚轮直径*3.14)/一圈总脉冲数]
3、 步进电机的位置控制就是角度控制与距离控制的综合。
以上只是简单的分析步进电机的控制方式,可能与实际有出入,仅供各位同仁参考。
4、伺服电机的动作与步进电机的一样,但要考虑伺服电机的内部电子齿轮比与伺服电机的减速比
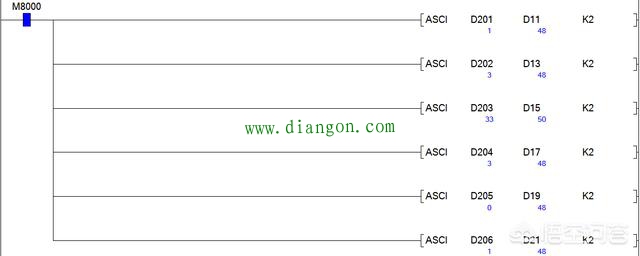
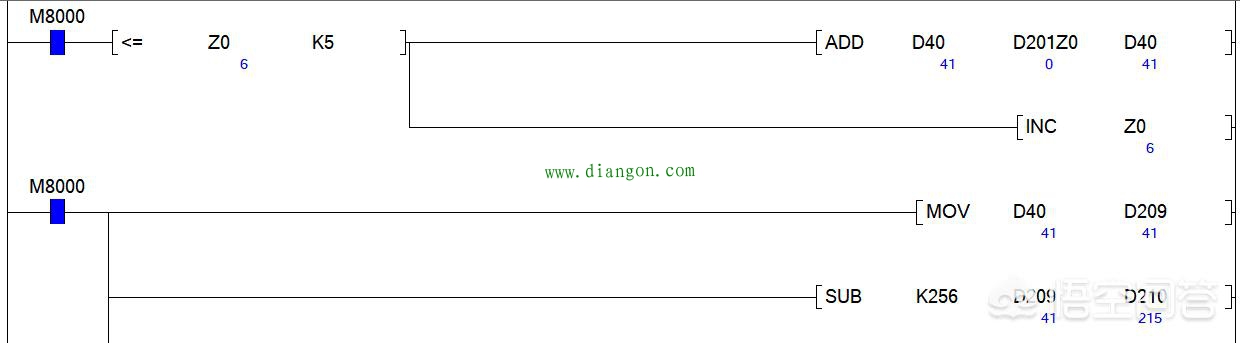
| 三菱plc中的LRC校验码程序的编写,在PLC与设备进行通讯时采用MODBUS协议时,一般会有两种数据模式,1是RTU模式,2是ASCII码模式。RTU的数据传输采用CRC校验,而ASCII码则采用LRC校验值。LRC值校验涵盖从从机地址到数据的信息部分,校验和等于所有参与校验数据的字符和的补码。 我们先说下具体的校验码怎么计算,说三菱plc的LRC校验码程序的编写。 例子1 采用ASCII码模式控制变频器指令:01 03 21 00 00 01,这条指令中01一般是站号,03是读取命令,2100是参数地址(例如运行频率),00 01代表数据的个数。那么它的LRC校验码怎么计算:指令的数据是16进制的,和为:0x01+0x03+0x21+0x01=0x26,对0x25取2的补码就是DA,具体计算就是取反加1,如:0x26=B0010,0110,取反后得到B1101,1001,加1得到B11011010=0xDA,那么LRC校验码就是DA。 例子2 同样的控制变频器指令:03 06 00 03 27 10, 和为0x43,取反加1为0xBD,LRC校验值就是BD。 明白了它的计算过程我们在PLC编写它的算法,我们知道在PLC的运算中都是十进制的,为了方便转换和计算,可采取一种方法(原理一样),我们知道ASCII码是2位的16进制数,取反过程可看做0xFF减去检验总和如上述的0x26、0x43,加1就变成0x100减去检验总和,转换成10进制的就是256(D)-和(D),再经过ASCI指令转换成ACIIS码就可以了。以下面梯形图进行说明:
|