





6ES7212-1BE40-0XB0现货供应
速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。
如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量小,驱动器对控制信号的响应快;位置模式运算量大,驱动器对控制信号的响应慢。

对运动中的动态性能有比较高的要求时需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,这时完全不需要使用。
一般说驱动器控制的好不好,每个厂家的都说自己做的好,现在有个比较直观的比较方式叫响应带宽。当转矩控制或者速度控制时通过脉冲发生器给他一个方波信号,使电机不断的正转、反转,不断的调高频率,上显示的是个扫频信号,当包络线的顶点到达高值的70.7%时表示已经失步,此时的频率的高低,就能显示出谁的产品牛了,一般的电流环能作到1000hz 以上,而速度环只能作到几十赫兹。
换一种比较的说法:
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10v对应5nm的话,当外部模拟量设定为5v时电机轴输出为2.5nm:如果电机轴负载低于2.5nm时电机正转,外部负载等于2.5nm时电机不转,大于2.5nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,一般应用于定位装置。应用领域如、印刷机械等等。
3 、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环pid控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
4、谈谈3环,伺服一般为三个环控制,所谓三环就是3个闭环负反馈pid调节系统。内的pid环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行pid调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,在转矩模式下驱动器的运算小,动态响应快。
第2环是速度环,通过检测的电机编码器的信号来进行负反馈pid调节,它的环内pid输出直接就是电流环的设定,速度环控制时就包含了速度环和电流环,任何模式都必须使用电流环,电流环是控制的根本,在速度和位置控制的系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
第3环是位置环,它是外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或终负载间构建要根据实际情况来定。由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有3个环的运算,此时的系统运算量大,动态响应速度也慢。
定位力矩:是指没有通电的情况下,定子锁住转子的力矩。
驱动器:是指用来运行步进电机的控制装置,包括、逻辑程序器、开关元件及确定步进速率的变频脉冲源。
动态力矩:在一定步进速率下电机所产生的力矩。动态力矩可由pull in(牵入)力矩或pull out(牵出)力矩所表示。
保持力矩:步进电机通以额定电流但没有转动时,定子锁住转子的力矩。
惯性:物体对加速度或减速的惯性测量值。此处用于指电机所要移动负载的惯性,或电机转子的惯性。
线性步进增量(步长):转子每旋转一个步距角,使丝杆所产生的线性行程。
温升:温升是电机与环境的温度差,是由电机发热引起的。运行中电机铁芯处在交变磁场中会产生铁损,绕组通电后会产生铜损,还有其它杂散损耗等,都会使电机温度升高。是电机设计及运行中的一项重要指标。
脉冲速率:每秒施加到电机绕组上的脉冲数量(pps)。脉冲速率等于电机步进速率。
每秒脉冲数(pps):电机在一秒内所产生的步数(有时称为“步数/秒”)。这由电机驱动器所产生的脉冲频率所决定。
升降速:在电机不失步的情况下,将给定负荷从原有的低步进速率增加至大,接着再降低至原有速率的一种驱动技术。
单步进响应 :电机进行完整的一步所要求的时间。
步进 :是指转子按从一个单拍励磁位置到下一个单拍励磁位置的转动。
对于旋转电机步进为转子所转过的角度,对于直线电机步进为直线距离。
步距角: 是指当空载状态下的步进电机的相邻两相绕组被先后单拍励磁时,它的
轴按步进序列运行一步所能转过的角位移。即转子所生产的每一步旋转的角度,测量单位为度(°)
负载力矩 :阻力力矩和惯性力矩之和。
pull out(牵出)力矩 :在规定驱动条件下,步进电机在给定脉冲频率下运行,不丢步时转轴上所能承受的大负载转矩。
pull in(牵入)力矩: 必须克服转子惯量的加速转矩,以及加速时固定连接的外接负载和各种摩擦转矩。牵入力矩通常小于牵出力矩。
力矩与惯性比率: 保持力矩除以转子转动惯量。
背隙: 丝杆和螺母的轴向间隙。
效率 :有用功率对驱动功率的比值。
实现的控制系统具有成本低、使用灵活的特点,广泛应用于、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域。步进电机是数字控制电机,将脉冲信号转换成角位移,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,步进电机适用于单片机控制。步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲信号频率决定。步进电机的驱动电路是根据单片机产生的控制信号进行工作。单片机通过向步进电机驱动电路发送控制信号就能实现对步进电机的控制。
1.系统设计原理
步进电机控制系统主要由单片机、键盘led、驱动/放大和pc上位机等4个模块组成,其中pc机模块是软件控制部分,该控制系统可实现的功能:1)通过键盘启动/暂停步进电机、设置步进电机的转速和改变步进电机的转向;2)通过led管显示步进的转速和转向等工作状态;3)实现三相或四相步进电机的控制:4)通过pc上位机实现对步进电机的控制(启停、转速和转向等)。为保护单片机控制系统硬件电路,在单片机和步进电机之间增加过流保护电路。图l为步进电机控制系统框图。

2.系统硬件电路设计
2.1 单片机模块
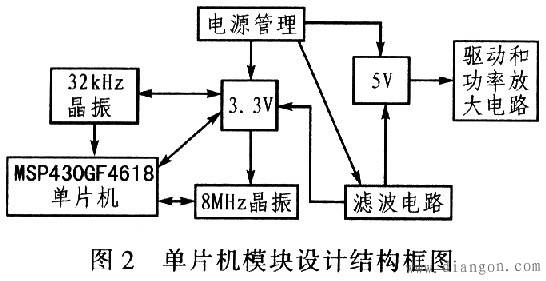
单片机模块主要由msp430fg4618单片机及外围滤波、管理和晶振等电路组成。msp430fg4618单片机内部的8 kb ram和116 kb flash满足控制系统的存储要求,p1和p2端口在步进电机工作过程中根据按键状态判断是否跳入中断服务程序来改变步进电机的工作状态,usart模块实现单片机和pc上位机之间的通信,实现pc机对步进电机控制。电源管理电路提供稳定的3.3 v和5 v电压,分别给单片机、晶振电路和驱动和功率放大电路供电。32 khz晶振给单片机、键盘/显示接口器件8279和脉冲分配器pmm8713提供时钟;当采用usart模块时需开启8mhz晶振设置通信模块。图2为单片机模块结构框图。
2.2 键盘/led模块
为实现人机对话,该系统设计扩展了3x4按钮矩阵键盘和4片8段led数码管,可手动直接操作该控制系统。系统上电后,通过键盘输入步进电机的启停、步数转速和转向等,由led管动态显示步进电机的转速和转向。键盘的输入和led管的输出由8279进行控制,减少单片机工作负担。8279编程工作在键盘扫描输入方式,读入键盘时具有去抖动功能,避免误触发。图3为键盘led模块设计结构框图。

2.3 驱动/放大模块
控制系统采用步进电机控制用的脉冲分配器(又称逻辑转换器)pmm8713,该器件是cmos,相输出驱动能力(源电流或吸入电源)为20 ma,适用于控制三相或四相步进电机,可选择下列6种激励方式:三相步进电进:1相,2相,1-2相;四相步进电进:1相,2相,1-2相。输入方式可选择单时钟(加方向信号)和双时钟(正转或反转时钟)两种方式,具有正反转控制、初始化复位、原点监视、激励方式监视和输入脉冲监视等功能。器件pmm8713由时钟选通、激励方式控制、激励方式判断和可逆环形计数器等部分构成,所有输入端内都设有施密特电路,可提高抗干扰能力。pmm8713输出需接功率驱动电路,选用功率驱动器pmm2101,大输出电流为1.4 a,满足驱动步进电机的要求。驱动/放大电路如图4所示。msp430单片机通过调节pmm8713的端口1~4输入脉冲信号控制步进电机的启停、速度和转向等。

3.系统软件设计
3.1 单片机程序
利用单片机的定时器timer_a(ta)中断产生脉冲信号,通过在响应的中断程序中实现步进电机步数和圈数的准确计数,通过pwm实现转速控制;利用p1.0端口的中断关闭ta中断程序,并推入堆栈,停止电机;p1.1中断则开启ta中断,堆栈推入程序计数器(pc),开启电机;p3.1端口输出高电平由pmm8713的u/d端口控制电机的转向;p3.0~p3.7端口接8279的8个数据接口,当单片机扫描到矩阵键盘有键按下时,利用p2端口的中断设置ta,控制启停、调速和转向等,单片机反馈给8279控制led管显示转速和转向。其程序流程如图5所示。

3.2 pc上位机模块
pc上位机模块实现pc机对步进电机的控制。利用msp430单片机的usart模块实现与pc上位机的通信,pc机通过串口向单片机发送控制命令,实现电机控制。单片机所接收到控制命令暂存在rxbuffer中,与存储在片内flash的中断程序的入口地址相比较,相同就进入中断,实现步进电机的控制。操作该模块时需要开启8 mhz晶振为usart模块设置波特率(设置波特率为9 600)。控制软件由vb6.0编写,利用mscomm控件实现串行通讯功能。其控制软件界面如图6所示。

4.系统检测
为检验该控制系统的实际工作情况,在给定pmm2101输出工作电流的状态下采用能量转化法测得步进电机输出的大静转矩。选取输出电流间隔0.2 a,测到步进电机大静转矩与电流之间关系的静特性曲线,如图7所示,说明该控制系统设计较合理。

5.
该系统通过msp430单片机控制步进电机运转情况,可靠性高,在电机运行时能够方便设定步进电机的启/停、转速和方向,提高步进电机的步进精度;能够控制三相或四相步进电机;由pc上位机完全控制步进电机的各种运行方式,使系统能够应用于恶劣环境中,保证人员安全,适用范围较广,且电路简单,成本较低,控制方便,移植性强,实用价值高。