





6ES7211-1HE40-0XB0现货供应
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 解释励磁,励磁就是指线圈通电时的状态。
● a相励磁
将 a 相励磁,会使得磁极磁化成 s 极,而其将与带有 n极磁性的 转子 1 的小齿互相吸引,并与带有s极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 b相磁极的小齿和带有 s极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 a 相励磁时的定子和转子小齿的位置关系。

● b相励磁
由 a 相励磁转为 b 相励磁时,b 相磁极磁化成 n 极,与拥有 s极磁性的转子 2 互相吸引,而与拥有 n极磁性的转子 1 相斥。

也就是说,从 a 相励磁转换至 b 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 a相→ b相→ c相→ d相→ e相→ a相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 a相→ e相→ d相→ c相→ b相→ a相励磁即可。
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,不需要编码器等即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:

由于组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈进行 4相或 5相励磁的。
1、运转需要的三要素:控制器、驱动器、步进

以上三部分是运转必不可少的三部分。控制器又叫脉冲产生器,目前主要有、、运动板卡等等。
2、运转量与脉冲数的比例关系

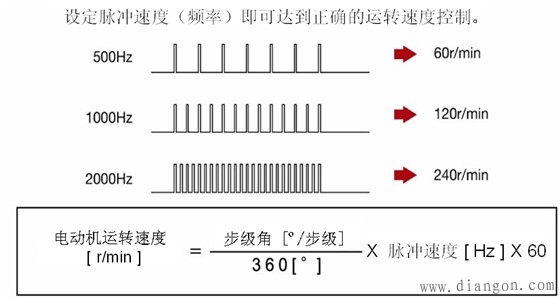
3、运转速度与脉冲速度的比例关系
4、本身具有保持力
步进电机只有在通电状况下,才具备自我保持力。在停电状况下 ,自我保持力消失。
在升降设备传动时,务必使用附电磁刹车型步进电机。
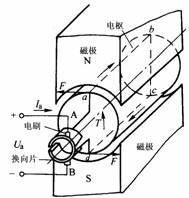
直流工作原理是建立在电磁力和电磁感应基础上的,是由于带电导体在磁场中受到电磁力的作用。如图所示直流电动机模型,它包括三个部分:固定的磁极、电枢、换向片与电刷。当将直流电压加到a、b两电刷之间,电流从a刷流人,从b刷流出,载流导体ab在磁场中受的作用力f按左手定则指向逆时针方向。同理,载流导体cd受到的作用力也是逆时针方向的。转子在电磁转矩的作用下逆时针方向旋转起来。当电枢恰好转过90°时,电枢线圈处于中性面(此时线圈不切割磁力线),电磁转矩为零。但由于惯性的作用,电枢将继续转动,当电刷与换向片接触时,导体ab和cd交换了位置。导体ab和cd中的电流方向改变了,这就保证了电枢可以连续转动。
从上面分析可知,要电磁转矩方向不变,导体从n极转到s极时,导体中的电流方向必须相应地改变,换向片与电刷即实现这一任务的机械式“换向装置”。
的运行性能与它的步进驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。相对于其他的驱动方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨率,可以减少或消除低频振动,使电机运行更加平稳均匀。
总体来说,细分驱动的控制效果好。因为常用低端步进电机伺服系统没有编码器反馈,随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。在速度和精度要求不高的领域,其应用非常广泛。
细分驱动精度高.细分是驱动器将上级装置发出的每个脉冲按驱动器设定的细分系数分成系数个脉冲输出.比喻步进电机每转一圈为200个脉冲,
如果两相直流步进驱动器细分为32,那么步进电机驱动器需要输出6400个脉冲步进电机才转一圈.
通常细分有2,4,8,56,512....
在国外,对于步进系统,主要采用二相混合式步进电机及相应的细分驱动器。
但在国内,广大用户对“细分”还不是特别了解,有的只是认为,细分是为了提高精度,其实不然,细分主要是改善电机的运行性能,
现说明如下:步进电机的细分控制是由驱动器**控制步进电机的相电流来实现的,以二相电机为例,假如电机的额定相电流为3a,如果使用常规驱动器(如常用的恒流斩波方式)驱动该电机,电机每运行一步,其绕组内的电流将从0突变为3a或从3a突变到0,相电流的巨大变化,必然会引起电机运行的振动和噪音。如果使用细分驱动器,在10细分的状态下驱动该电机,电机每运行一微步,其绕组内的电流变化只有0.3a而不是3a,且电流是以正弦曲线规律变化,这样就大大的改善了电机的振动和噪音,在性能上的优点才是细分的真正优点。由于细分驱动器要**控制电机的相电流,对步进电机驱动器要有相当高的技术要求和工艺要求,成本亦会较高。
注意,国内有一些驱动器采用“平滑”来取代细分,有的亦称为细分,但这不是真正的细分,望广大用户一定要分清两者的本质不同:
1.“平滑”并不**控制电机的相电流,只是把电流的变化率变缓一些,“平滑”并不产生微步,而细分的微步是可以用来**定位的。
2.电机的相电流被平滑后,会引起电机力矩的下降,而细分控制不但不会引起电机力矩的下降,力矩会有所增加。