





西门子6ES7 215-1BG40-0XB0型号介绍
其实我选择编码器就看几点,使用要求精度,如果很高就选择高分辨率的,其实是你使用环境的条件,一般有24v的和5v的,看看你啥了,就是你的编码器连接的控制器,根据你控制器可以接受的信号来选择编码器,是ttl的还是集电极开路的或者是正弦波的,并且不同的信号传输距离还是不一样的,这个要根据你的使用要求
如a.b两相联接,用于正反向计数、判断正反向和测速。
a、b、z三相联接,用于带参考位修正的位置测量。
a、a-,b、b-,z、z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减小,抗干扰佳,可传输较远的距离。对于ttl的带有对称负信号输出的编码器,信号传输距离可达150米。
参照此公式
下面介绍增量型编码器分辨率选择的三种方法:
1、单圈脉冲数尽量选择为所需要的精度控制,这样可以减少缩放比例,如12m测量范围,测量显示仅需1m/步(低分辨率),则可选择12ppr,如果需要显示0.01m/步(高分辨率)应选择1200ppr或者以上的编码器。如果你选择了600ppr的编码器测量显示0.01m/步的精度,则需要进行比例换算,降0.02m/步换算为0.01m/步。
2、将所选择的单圈脉冲数ppr和电机驱动增量编码器的大转速综合考虑,计算工作频率,确保其不会引起在大转速下脉冲输出频率超过编码器的脉冲输出频率和控制器的输入频率。
3、注意可能使用的控制器带有2倍或者4倍倍频功能,按以上事例,0.01m/步的测量精度,选择600ppr并进行2倍频或者300ppr进行4倍频,可达到同样的效果。
增量型编码器的特点具有体积小,重量轻,机构紧凑,安装方便,维护简单,驱动力矩小,其具有高精度,大量程测量,反应快,数字化输出特点,非常适合测速度,可无限累加测量。存在零点累计误差,抗干扰较差,接收设备的停机需断电记忆,开机应找零或参考位等问题,这些问题如选用型编码器可以解决
运动控制器通常是以微处理器为核心,由计算机编程、运动轨迹设计,向伺服或步进电动机发出运动指令,实现被控制对象的位置、速度、加速度控制。运动控制器可分为“箱式”、“卡式”和“单片”三个层次。这里介绍的是单片大规模的运动控制器。实际上,它是一种专用微控制器。如图所示,它们从主计算机接收控制指令,从伺服电动机的增量编码器读取位置信息,向伺服电动机功率驱动电路输出运动指令。对于伺服电动机位置闭环系统来说,它们主要是完成了位置环的作用,可称为数字伺服运动控制器。它们适用于直流伺服电动机、无刷直流伺服电动机和步进电动机的闭环伺服控制。而gl—1200步进伺服控制器则将一个直流伺服电动机闭环控制转换成类似对一台步进电动机开环控制一样,使主控制器的控制算法得以简化。

在防空武器系统中,由炮瞄雷达自动跟踪空中飞行目标,将目标的距离、方位角、高低角等数据不断地传递给火控计算机,后者算出目标飞行的速度、航向,并算出火炮瞄准目标进行射击必须的提前量,控制火炮方位伺服系统和高低伺服系统,带动炮身指向预定的方向对空射击,火炮伺服系统是防空武器系统中不可缺少的一环。
火炮方位伺服系统控制炮身绕垂直地面轴沿水平方向转动,高低伺服系统控制炮身绕耳轴作俯仰运行。前者沿水平方向转动可以不受限制,后者转角有限制,以炮管轴线与地平面夹角表示,一般在 范围之内,两套伺服系统的线路基本一致,现以一种火炮方位伺服系统为例加以介绍。
范围之内,两套伺服系统的线路基本一致,现以一种火炮方位伺服系统为例加以介绍。

:一种将电脉冲信号变换成相应的角位移或直线位移的机电执行元件。
数控装置输出的进给脉冲数量、频率和方向经过驱动控制电路达到步进电机后,可以转换为工作台的位移量、进给速度和进给方向。

图 开环步进式伺服系统组成框图
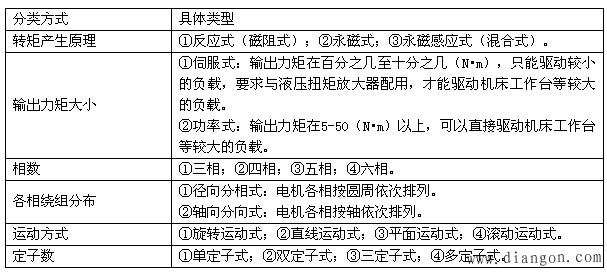
表 步进电机的类型
1.步距角和静态步距误差
步距角和的相数、通电方式及电机转子齿数的关系如下:
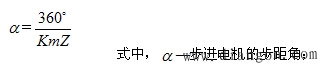
m—电机相数;
z—转子齿数;
k—系数,相邻两次通电相数相同,k=1;相邻两次通电相数不同,k=2。
同一相数的步进电机可有两种步距角,通常为1.2/0.6、1.5/0.75、1.8/0.9、3/1.5度等。步距误差是指步进电机运行时,转子每一步实际转过的角度与理论步距角之差值。连续走若干步时,上述步距误差的累积值称为步距的累积误差。由于步进电机转过一转后,将重复上一转的稳定位置,即步进电机的步距累积误差将以一转为周期重复出现。步距误差主要由步进电机步距制造误差,定子和转子间气隙不均匀以及各相电磁转矩不均匀等因素造成。
2.静态转矩与矩角特性
当步进电机上某相定子绕组通电之后,转子齿将力求与定子齿对齐,使磁路中的磁阻小,转子处在平衡位置不动(θ=0)。如果在电机轴上外加一个负载转矩m,转子会偏离平衡位置向负载转矩方向转过一个角度θ,角度θ称为失调角。有失调角之后,步进电机就产生一个静态转矩(也称为电磁转矩),这时静态转矩等于负载转矩。静态转矩与失调角θ的关系叫矩角特性,如图4-42所示,近似为正弦曲线。该矩角特性上的静态转矩大值称为大静转矩。在静态稳定区内,当外加负载转矩除去时,转子在电磁转矩作用下,仍能回到稳定平衡点位置(θ=0)。
1.工作台位移量的控制
数控装置发出n个脉冲,经驱动线路放大后,使定子绕组通电状态变化n次,如果一个脉冲使步进电机转过的角度为a,则步进电机转过的角位移量φ=na,再经减速齿轮、丝杠、螺母之后转变为工作台的位移量l,即进给脉冲数决定了工作台的直线位移量l。
2.工作台进给速度的控制
数控装置发出的进给脉冲频率为f,经驱动控制线路,表现为控制步进电机定子绕组的通电、断电状态的电平信号变化频率,定子绕组通电状态变化频率决定步进电机的转速,该转速经过减速齿轮及丝杠、螺母之后,体现为工作台的进给速度v,即进给脉冲的频率决定了工作台的进给速度。
3.工作台运动方向的控制
改变步进电机输入脉冲信号的循环顺序方向,就可改变定子绕组中电流的通断循环顺序,从而使步进电机实现正转和反转,相应的工作台进给方向就被改变。