西门子模块6ES7512-1CK01-0AB0性能参数
Siemens编程器S7-200系列用在中小型设备上的自动系统的控制单元,适用于各行各业,各种场合中的检测,监测及控制。
在这里,和大家一起来讨论S7-200几个使用方面的情况。
1.步进,伺服脉冲定位控制。
在设备的控制系统中,有关运动控制是很重要的,下面我们来看一看西门子S7-200系列PLC怎样来实现这 个功能。
确定使用哪个端口来发脉冲,如采用Q0.0发脉冲,则它的控制字为SMB67,脉冲同期为SMW68,脉 冲个数存放在SMD72中,
下面是控制字节的说明:
Q0.0 Q0.1 控制字节说明
SM67.0 SM77.0 PTO/PWM更新周期值 0=不更新,1=更新周期值
SM67.1 SM77.1 PWM更新脉冲宽度值 0=不更新,1=脉冲宽度值
SM67.2 SM77.2 PTO更新脉冲数 0=不更新,1=更新脉冲数
SM67.3 SM77.3 PTO/PWM时间基准选择 0=1微秒值,1=1毫秒值
SM67.4 SM77.4 PWM更新方法 0=异步更新,1=同步更新
SM67.5 SM77.5 PTO操作 0=单段操作,1=多段操作
SM67.6 SM77.6 PTO/PWM模式选择 0=选择PTO,1=选择PWM
SM67.7 SM77.7 PTO/PWM允许 0=禁止PTO/PWM,1=允许
这样根据以上表格,我们得出Q0.0控制字:SMB67为:10000101
采用PTO输出,微妙级周期,发脉冲的周期(也就是频率)与脉冲个数都要重新输入。10000101转化为 16进制 为85,有了控制字以后,我们来写这一段程序:

根据上面这段程序,我们知道了控制字的使用,也知道步进电机的脉冲周期与冲个数的存放位置(对 Q0.0来说是SMW68与SMD72)。当然,VW100与VD102内的数据不同的话,步进电机的转速和转动圈数就不一样。
还有一点需要说明得是:M0.0导通---PLC捕捉到上升沿发动脉冲输出后,想停止的话,只须改变端口脉冲的 控制字,再启动PLS即可,程序如下:

2.高速计数功能。
西门子S7-200系列PLC具有高速计数的功能;举一例子来谈谈高速计数的用途,我们采用普通电机来带动丝杆转动,我们想控制转动距离,怎么来解决这个问题?那么我们可在电机另一头与一编码器联接,电机转一圈,编码器也随之转一圈,根据规格发出不同的脉冲数。当然,这些脉冲数的频率比较高,PLC不能用普通的上升沿计数来取得这些脉冲,只能通过高速计数功能了。
启动高速计数功能,也要具有控制字
HSCO HSC1 描述
SM37.0 SM47.0 复位有效电平控制位 0=高电平有效, 1=低电平有效
SM37.1 SM47.1 启动有效电平控制位于 0=高电平有效, 1=低电平有效
SM37.2 SM47.2 正交计数器速率选择 0=4X计数率, 1=1X计数率
SM37.3 SM47.3 计数方向控制位 0=减计数, 1=正计数
SM37.4 SM47.4 向HSC中写入计数方向 0=不更新, 1=更新计数方向
SM37.5 SM47.5 向HSC中写入预置值 0=不更新, 1=更新预置值
SM37.6 SM47.6 向HSC中写入当前值 0=不更新, 1=更新当前值
SM37.7 SM47.7 HSC允许 0=禁止HSC, 1=允许HSC
参照上面的表格,我们选择HSC1高速计数器,控制字为SMB47,现在我们启动高速计数器HSC1,选择为增计数,更新计数方向,重新设置值,更新当前值:这样的话,HSC1的启动控制高为:11111000转化为16进制为 F8,将启动计数器时当前值存放在SMD48中,将预存置放在SMD52中,具体的程序 如下:

同样的,如果计数器在工作状态下想停止计数器,也必须改变它的控制字后,启动HSC具体程序 如下:

3. PID回路控制功能。
西门子S7-200系列PLC的PID控制相当的简单,可以通过micro/win软件的一个向导程序,按照提示,一步一步执行您所要求PID控制的属性即可,在这里谈一谈PID这三个参数的具体意义:P为增益项,P越大,响应起就快,在调节**阀时:设定**为50%,当目前**接近50%,刚超过,如果P值很大的话,那么**阀会马上会关闭,而不会控制在某一区域。这就是增益项太大引起。在调节的过程中应该先将P值调节比较适当了,再去调节I值,它为积分项,是在控制器回路中控制对当前值与设定值相等的偏差范围。D为微分项,主要作用是避免给定值的微分作用而引起的跳变。
在现场的PID参数的调整过程中,针对西门子S7-200型PLC我的建议是在不同的控制阶段,采用不同的PID参数组,具体而言就是当目前距离设定值差距较大时,采用P值较大的一套PID参数,如果当前值快接近设定值范围时,采用P值较小的一套PID参数
1、大限度的满足被控对象提出的各项性能指标
为明确控制任务和控制系统应有的功能,设计人员在进行设计前,就应深入现场进行调查研究,搜集资料,与机械部分的设计人员和实际操作人员密切配合,共同拟定电气控制方案,以便协同解决在设计过程中出现的各种问题。
2、确保控制系统的安全可靠
电气控制系统的可靠性就是生命线,不能安全可靠工作的电气控制系统,是不可能长期投入生产运行的。尤其是在以**产品数量和质量,保证生产安全为目标的应用场合,必须将可靠性放在,甚至构成冗余控制系统
3、力求控制系统简单
在能够满足控制要求和保证可靠工作的前提下,应力求控制系统构成简单。只有构成简单的控制系统才具有经济性、实用性的特点,才能做到使用方便和维护容易。
4、留有适当的裕量
考虑到生产规模的扩大,生产工艺的改进,控制任务的增加,以及维护方便的需要,要充分利用plc易于扩充的特点,在选择PLC的容量(包括存储器的容量、机架插槽数、I/O点的数量等)时,应留有适当的裕量
、元素的位置、安排及特性
所有元素可以定位在屏中的任何位置(除极少数特例之外,待后文详述)。定位的方法可以在该元素有关的对话框中,直接输入在屏幕中的X、Y坐标。也可以用鼠标选中后不松手直接进行拖动定位。
各元素在生成之后,在界面上进行放大或缩小。使得界面更加主次分明、生动协调。
一般而言,各元素在界面上可以重叠,但必须以不产生歧义为基本原则。例如,在一个图形上写字;在一行文字上叠加触摸键等。将两个触摸键重叠安排,则是不行的。
当有元素重叠安排时,就必然出现前台和后台问题。有可能出现不同的视觉效果,可以按要求进行调整。
并非所有元素都是显形的。有些元素如果其颜色与背景相同,有可能看不见。有些动态显示的元素,当无内容可显示时,也有可能看不见。上一节所介绍的触摸键,就可以设定为隐形的,但功能不变。
一、元素的清除和复制
与所有的绘图软件一样,元素、组件或整个界面可以随时被清除,也可被复制。可复制到本界面,也可复制到其他的界面上,甚至可以复制到其他设计项目的界面上(注意:并非所有界面都具有通用性。一般在使用同一厂家的同一系列触摸屏产品时可行。等级低的触摸屏界面向高等级的触摸屏兼容)。
复制功能是很有用而方便的。因为同一项目中不少界面是基本相同的,仅需修改少数不同的元素。
三、元(件)素库的使用
并非所有的元素都需要每次一笔一笔地画上去。因为软件中包含着相当丰富的图库。它提供各式各样的指示灯、开关、按键等图形,以及工程中经常用到的设备示意图,如电动机、泵、管道、阀门、储罐等,甚至可能提供较复杂的模块。这些随时可供调用。
四、元素的打包(综合)
在制造机器时,总是先将有关的零件装配成为各种组件,调试好之后存放在半成品仓库中。后再将各种组件总装成为完整的产品。在编制软件时,经常将某些通用的功能段,独立出来成为“子程序”,可以随时调用。在制作触摸屏的界面时,也按同样的思路,针对本工作领域,专门绘制某些组件或模块。打包之后,可以命名注册,编号后存入库中,这样将丰富库的内容。
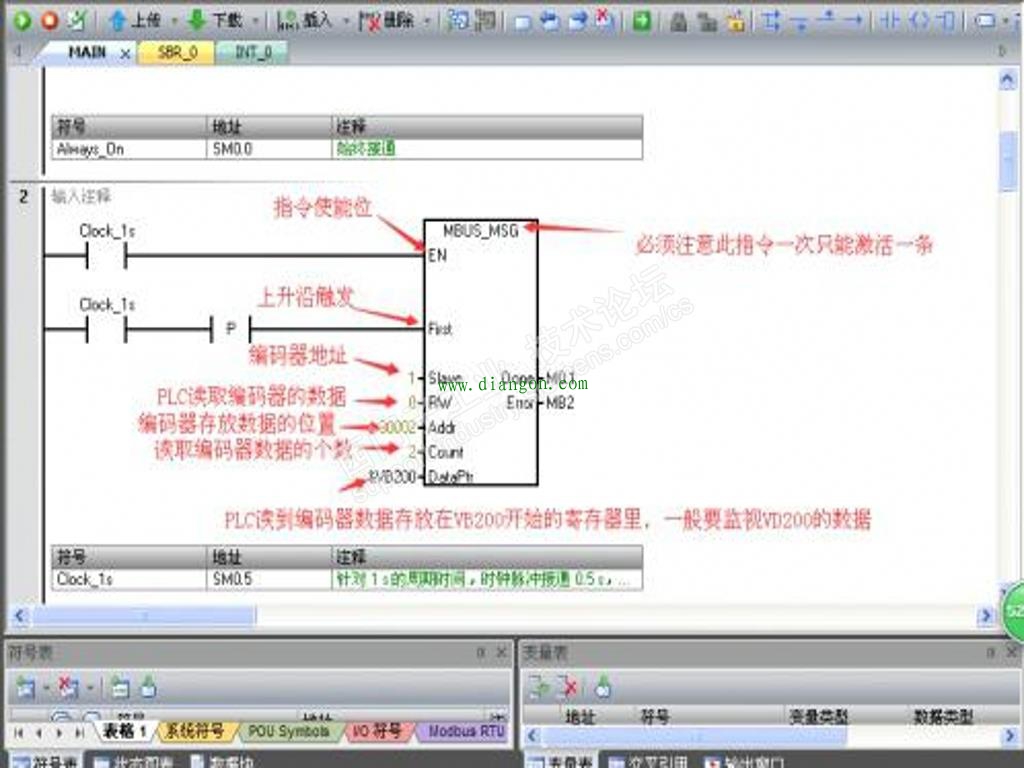
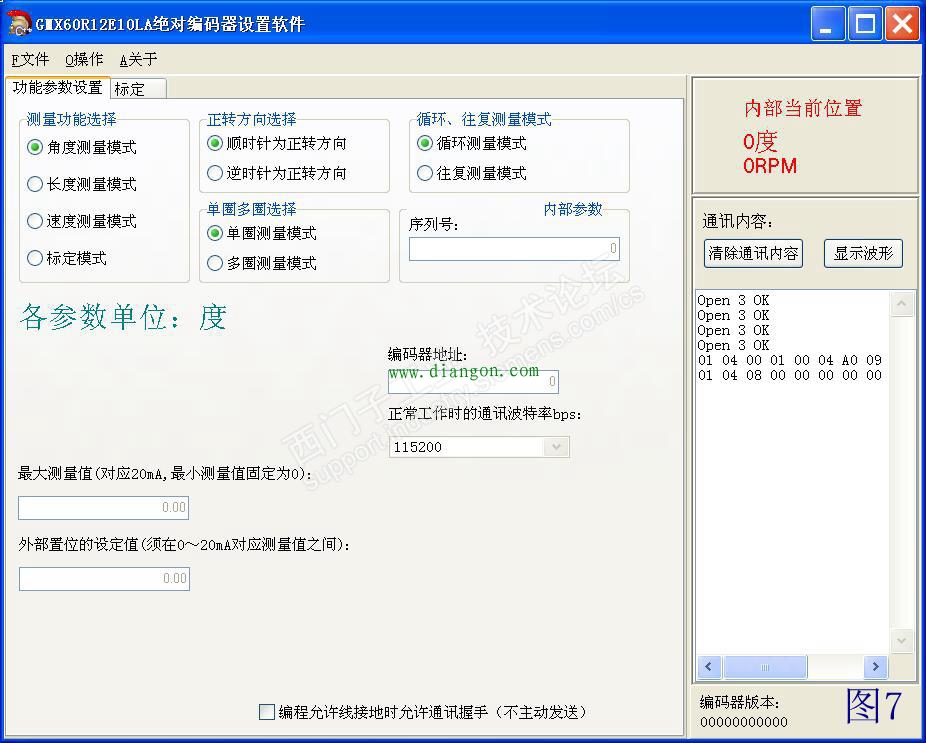
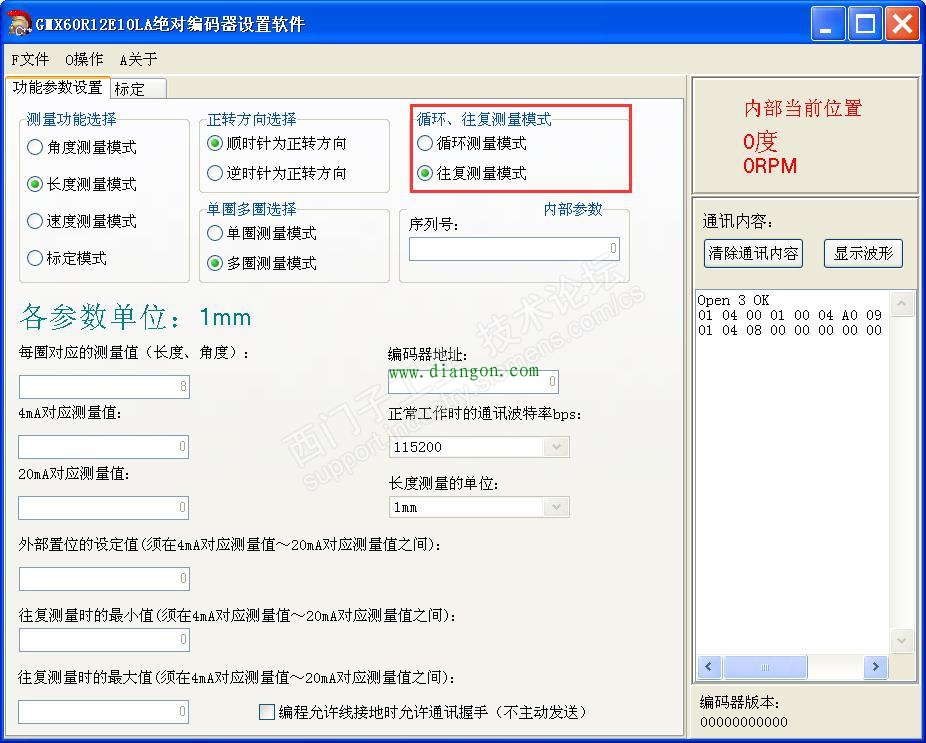
| 硬件准备 1、西门子plc(smart200) 2、值编码器 3、装有STEP7-MicroWIN SMART软件的电脑 4、网线
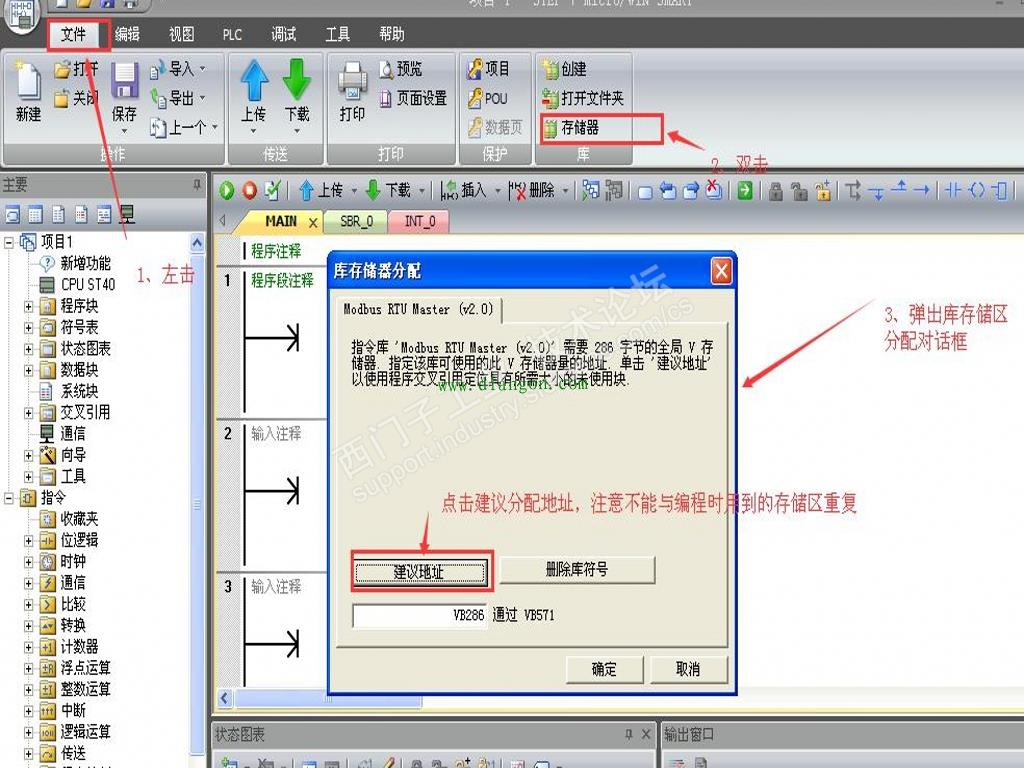
4、给MODBUS指令分配库寄存器
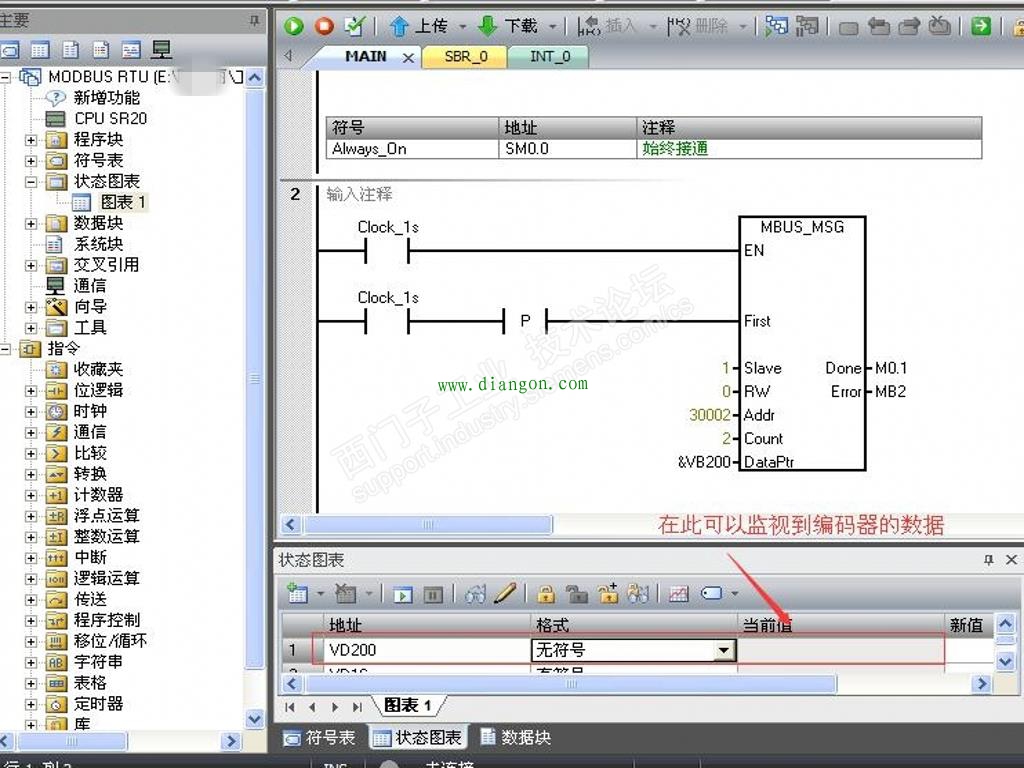
5、编译、下载,可以在状态图表里监控VD200数据
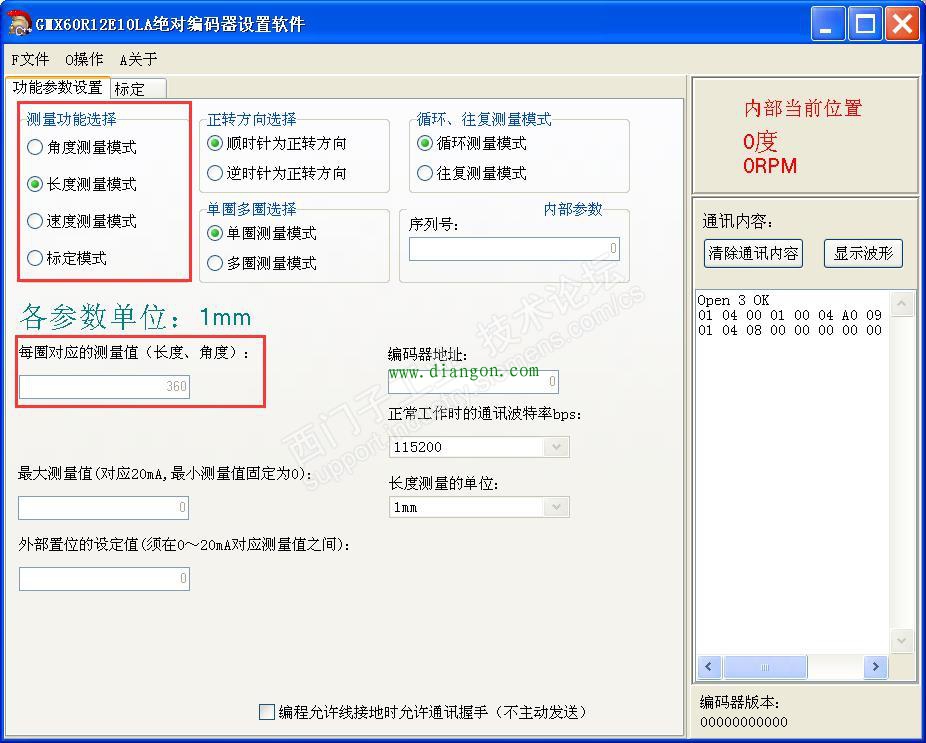
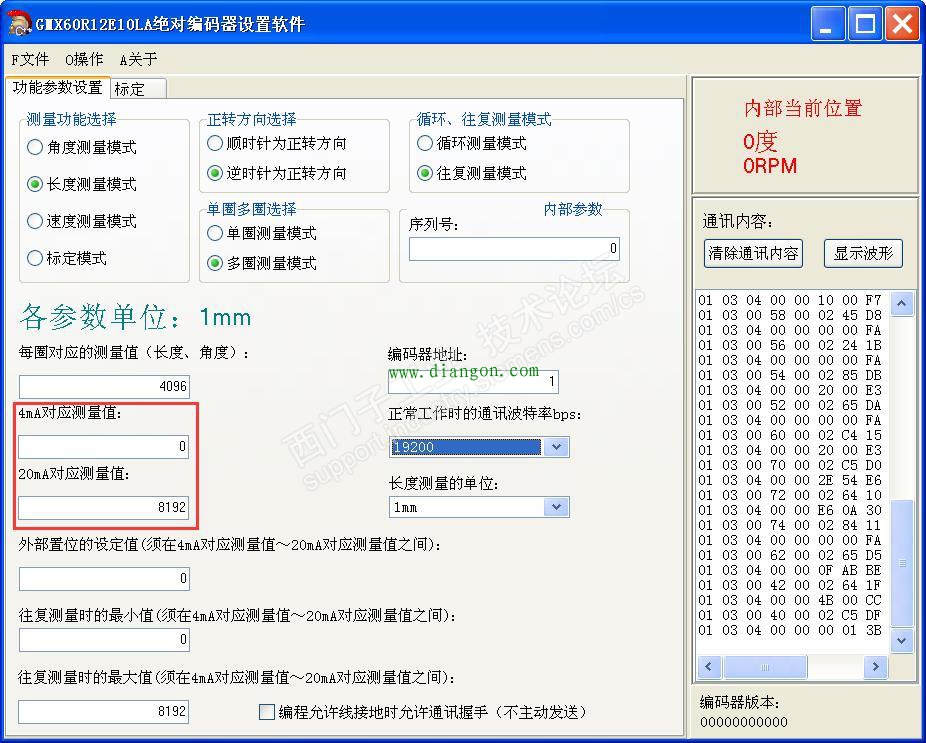
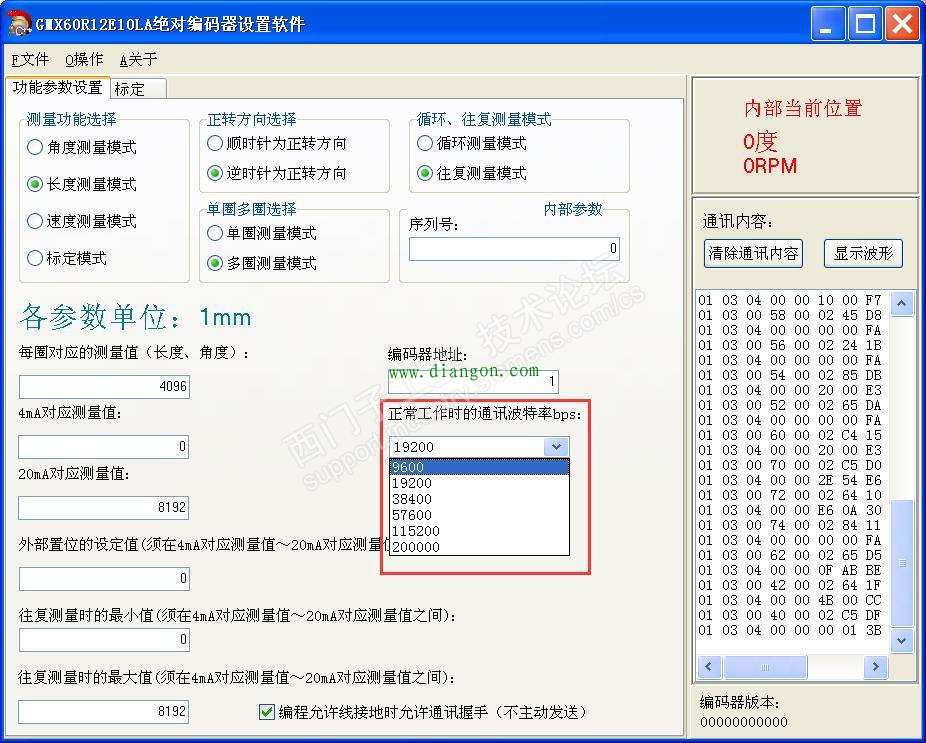
注:这里的编码器值是长度值还是角度值需要可以通过easyPro软件来设定
|