6ES7517-3TP00-0AB0安装调试
01什么是PLC的模拟量
在工业生产过程中,有两种量,一种是开关量,开关量只有0 、1 两种状态,开关断开,就表示为0,开关接通就表示为1。模拟量是指变量在一定范围内连续变化的量,在一定的定义域内可以取任意值。例如对温度,压力,液位,深度等数据进行监测和控制。这些物理量都是随时间的变化而变化的,在控制领域将这些随时间变化而发生变化的物理量称为模拟量。
模拟量模块的类型有三种,普通模拟量模块、RTD模块和TC模块。200 smart PLC普通模拟量模块可以采集标准电流和电压信号。电流有0-20mA、4-20mA()两种信号。电压有+-2.5V、+-5V、+/10V三种信号类型。200 smart普通模拟量对应的数字量范围为0到27648或-27648到27648。200 smart模拟量精度为11Bit (0—27648)。
EM AM06模拟量输入/输出模块
0—10V取信号简单,接线方便,用于一般环境,0—20 MA和4—20MA相比,后者占市场率高。在4—20MA中,低于4MA可判断为开路,大于20MA可认定为短路故障。电流和电压相比,电流源的内阻无限大,电流阻抗低,抗干扰强,信号稳定,传输距离远。
RTD热电阻模块是用来进行温度的测量,也叫“电阻温度检测器"。它的电阻值会随着温度的升高而变大,随着温度的降低而减小。常见的RTD材料有铂(Pt)、镍(Ni)、铜(Cu)。例如铂热电阻Pt100,表示该传感器在0℃下的电阻值为100Ω 。
PT100热电阻温度传感器
热电偶TC是温度测量仪表中常用的测温元件,热电偶直接测量温度,将温度信号转换成热电动势信号。当两种不同的导体或半导体A和B组成一个回路,其两端相互连接时,只要两结点处的温度不同,回路中将产生一个电动势,该电动势的方向和大小与导体的材料及两接点的温度有关。这种现象称为“热电效应",两种导体组成的回路称为“热电偶",热电偶产生的热电动势只随测量端温度的变化而变化,利用测量热电动势的方法就可达到测温的目的。
K型热电偶温度传感器
目前常用的热电偶类型有8种,S、R、B、E、T、J、K、N。其中S、R、B属于贵金属材料热电偶;E、T、J、K、N属于廉金属材料热电偶。对于不同型号类型热电偶拥有不同测量的温度区间,200 SMART EM TC模块可以测量J、K、T、E、R、S和N型等热电偶温度传感器。
热电阻和热电偶的选型要点
测量500℃以上一般选择热电偶,500℃以下一般选择热电阻。对测量精度要求较高的选择热电阻,对精度要求不高的选择热电偶,热电偶与热电阻都是温度传感器。热电阻测量的是电阻信号,热电偶测量的是电压信号。200 SMART EM RTD和TC模块的通道值除以10就是实际的温度值。由于RTD和TC模块的通道值是整数值,需要把整数值转换成浮点数才能在计算后得到带有小数位的温度值。PLC有热电阻模块和热电偶模块,可直接输入电阻和电偶信号,选购时应注意类型
什么是零件?什么是构件?什么是部件?
零件是组成机器的不可拆的基本单元,即制造的基本单元。如齿轮、轴、螺钉等。
构件是组成机器的运动的单元,可以是单一整体也可以是由几个零件组成的刚性结构,这些零件之间无相对运动。如内燃机的连杆、凸缘式联轴器、机械手的某一关节等。
部件是由一组协同工作的零件所组成的独立制造或独立装配的组合体,如减速器、离合器、联轴器。 什么是机械?机构?机器?
机械是机器和机构的总称。
机构是用来传递与变换运动和力的可动装置。
机器是根据某种使用要求而设计的一种执行机械运动的装置,可以用来传递或变换能量、物料和信息。

No.2
什么是构件?运动副?运动链
零件:组成构件的制造单元体。
构件:机器人中每一个独立运动单元体称为构件。
运动副:这种由两个构建直接接触而组成的可动联接称为运动副。
高副:凡两构件通过单一点或线接触而构成的运动副称为高副。
低副:通过面接触而构成的运动副统称为低副。
转动副:两构件之间的相对运动为转动,也成铰链。
运动链:构件通过运动副的联接而构成的相对可动的系统成为运动链。
机构:在运动链中,某一构件固定成为机架,该运动链便成为机构。
零件→构件→运动副→运动链→机构→机器(后两个简称机械)

No.3
四杆机构的基本形式?
①曲柄摇杆机构②双曲柄机构(包含平行四边形机构和反平行四边形机构)③双摇杆机构

No.4
齿轮机构的分类?
用于平行轴间的传动的齿轮机构——直齿轮
用于相交轴间的传动的齿轮机构——锥齿轮
用于交错轴间的传动的齿轮机构——斜齿轮
No.5
齿轮机构的作用和特点是什么?
齿轮作用:传递空间任意两轴间的运动和动力 齿轮特点:传动功率大,效率高,传动比**,使用寿命长,工作安全可靠。但一般不是适合长距离传动,能量损耗较大。
END
以上素材来源于网络收集,由公众号 电子开发网 整理发布,如有侵权,我们将在时间删除。欢迎大家在下方评论处积极发表意见,我们共同学习,共同进步。
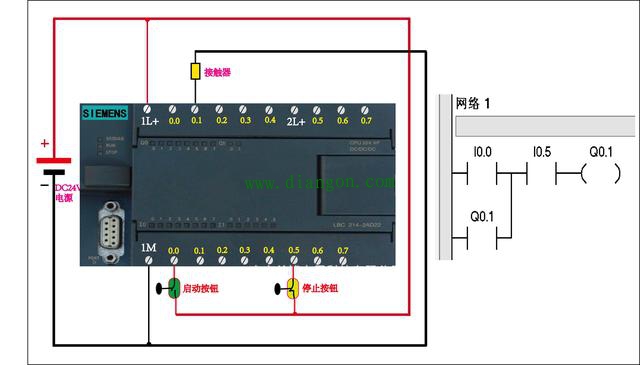
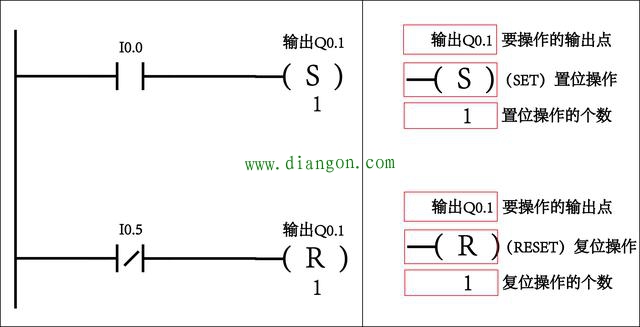
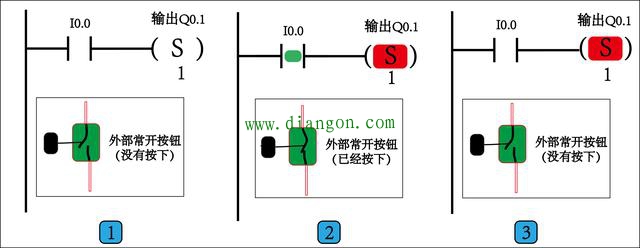
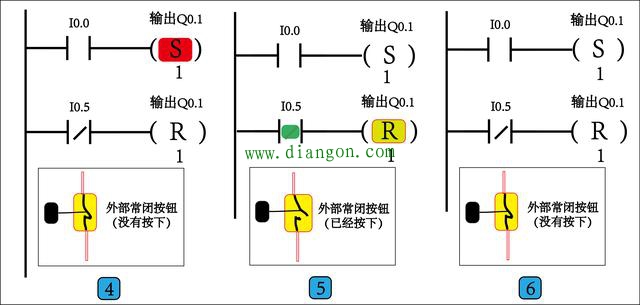
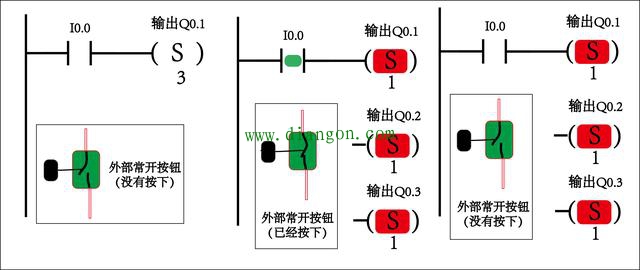
| 本文介绍西门子s7-200 plc的置位与复位,这两个位操作的指令在我们的程序编写中,作用也是很大,它能完成一些,常规常开常闭触点编程无法完成的程序,可以使我们编写的PLC程序条理更加清晰,步骤更加简单。它们两个在每次使用时99%的情况下都是成对出现的,只要我们在程序一个地方使用了置位,在程序的另一个地方就会用到复位。永远都是你等着我,我等着你,只要你要不来我就不老。置位与复位的大体意思就是,置位是对一个位写1(有输出),复位就是写0(没有输出)。下面介绍使用法。
|