





西门子模块6ES7215-1AF40-0XB0型号规格
PLC在生产中具有很重要的作用,为了使PLC发挥大的作用,在设计PLC的时候要充分考虑它的容量问题,根据实际情况,做出恰当的选择。
对于频繁通断的负载,应该选用晶闸管输出或晶体管输出,它们属于无触点元件。但晶闸管输出只能用于交流负载,而晶体管输出只能用于直流负载。
2)输出接线方式
关量输出模块主要有分组式和分隔式两种接线方式,
分组式输出是几个输出点为一组,一组有一个公共端,各组之间是分隔的,可分别用于驱动不同电源的外部输出设备;分隔式输出是每一个输出点就有一个公共端,各输出点之间相互隔离。选择时主要根据PLC输出设备的电源类型和电压等级的多少而定。一般整体式PLC既有分组式输出,也有分隔式输出。
3)驱动能力
开关量输出模块的输出电流(驱动能力)必须大于PLC外接输出设备的额定电流。用户应根据实际输出设备的电流大小来选择输出模块的输出电流。如果实际输出设备的电流较大,输出模块无法直接驱动,可增加中间放大环节。
4)注意接通的输出点数量
选择开关量输出模块时,还应考虑能接通的输出点数量。接通输出设备的累计电流值必须小于公共端所允许通过的电流值,如一个220V/2A的8点输出模块,每个输出点可承受2A的电流,但输出公共端允许通过的电流并不是16A(8×2A),通常要比此值小得多。一般来讲,接通的点数不要超出同一公共端输出点数的60%。
5)输出的大电流与负载类型、环境温度等因素有关
开关量输出模块的技术指标,它与不同的负载类型密切相关,特别是输出的大电流。晶闸管的大输出电流随环境温度升高会降低,在实际使用中也应注意PLC在生产中具有很重要的作用,为了使PLC发挥大的作用,在设计PLC的时候要充分考虑它的容量问题,根据实际情况,做出恰当的选择。
汇点式的开关量输入模块所有输入点共用一个公共端(COM);而分组式的开关量输入模块是将输入点分成若干组,每一组(几个输入点)有一个公共端,各组之间是分隔的。分组式的开关量输入模块价格较汇点式的高,如果输入信号之间不需要分隔,一般选用汇点式的。
3)注意接通的输入点数量
对于选用高密度的输入模块(如32点、48点等),应考虑该模块接通的点数一般不要超过输入点数的60%。
4)输入门槛电平
为了提高系统的可靠性,必须考虑输入门槛电平的大小。门槛电平越高,抗干扰能力越强,传输距离也越远,具体可参阅PLC说明书。
2.开关量输出模块的选择
开关量输出模块是将PLC内部低电压信号转换成驱动外部输出设备的开关信号,并实现PLC内外信号的电气隔离。选择时主要应考虑以下几个方面:
1)输出方式
开关量输出模块有继电器输出、晶闸管输出和晶体管输出三种方式。
继电器输出的价格便宜,既可以用于驱动交流负载,又可用于直流负载,适用的电压大小范围较宽、导通压降小,承受瞬时过电压和过电流的能力较强,但其属于有触点元件,动作速度较慢(驱动感性负载时,触点动作频率不得超过1HZ)、寿命较短、可靠性较差,只能适用于不频繁通断的场合
有三个A/O块,分别是EM232、EM235、EM231。从模块型号可看出,这三块模块模拟量输出、模拟量输入/输出、模拟量输入。模块型号的个数字代表是西门子那个系列的PLC,2就是西门子200系列的PLC。中间那个数字代表模块是数字量还是模拟量的,图中所示模块都是3,代表的是模拟量模块。后一个数字代表模块是输入还是输出,1代表输入、2代表输出、5代表输入和输出(对于模拟量模块而言的)。 还可以从模块型号如EM232、EM235、EM231的下面,分别标出AQ4、AI4/AQ1、AI4,那么就可以得知此的信息不仅仅是模块属于数字量还是模拟量模块,还能知道模块有几路模拟量输出或输入。 例如EM232模块标识的AQ4,说明是模拟量输出模块,有四路输出模拟通道。EM235模块标识的AI4/AQ1,说明此模块即是模拟量模块又是数字量模块,有四路模拟量输入通道,有一路模拟量输出通道。EM321模块标识的AI4,说明是模拟量输入模块,有四路模拟输入通道。比如,四路模拟输入通道,意思就是可以接现场模拟量设备四台,一路模拟量输出,意思就是说可以给现场一台执行机构提供模拟量信号 |

本文主讲在s7-200SMART plc中PID的自整定功能和调试面板。
一、PID自整定说明
在新的S7-200SMART CPU支持PID自整定功能,在STEP 7-Micro/WIN SMART编程软件中也添加了PID调节控制面板。用户可以使用用户程序或PID调节控制面板来启动自整定功能。在同一时间多可以有8个PID回路进行自整定。PID调节控制面板也可以用来手动调试老版本的(不支持PID自整定)CPU的PID控制回路。用户可以根据工艺要求为调节回路选择快速响应、中速响应、慢速响应或极慢速响应。PID自整定会根据响应类型而计算出优化的比例、积分、微分值,并可应用到控制中。
二、PID调节控制面板
STEP 7-Micro/WIN SMART中提供了一个PID控制面板,可以用图形方式监视PID回路的运行,从面板中还可以启动、停止自整定功能。
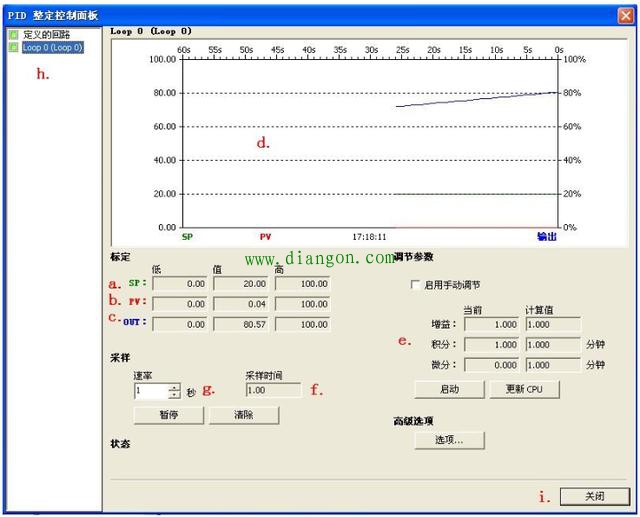
图1. PID调节控制面板
在图1中:
a、当前设定值指示,显示当前使用的设定值;b、过程值指示,显示过程变量的值;c、当前的输出值指示,显示当前的输出值;d、可显示过程值、设定值及输出值的PID趋势图
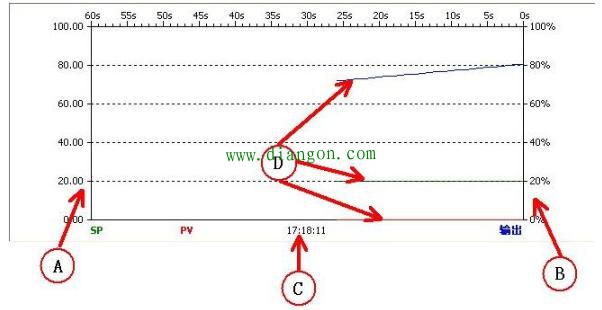
图2. 图形显示区
图2中:
A、过程变量和设定值的取值范围及刻度
B、PID输出的取值范围及刻度
C、实际PC时间
D、以不同颜色表示的设定值、过程变量及输出的趋势图
e、调节参数,这里你可以:
选择PID参数的显示:当前参数、推荐参数或手动输入值
在手动调节模式下,可改变PID参数,并按更新PLC按钮来更新PLC中的参数
启动PID自整定功能
选择选项按钮进入参数设定
f、当前采样时间,指示当前使用的采样时间 ;g、时间选项设定,这里你可以设定趋势图的时基,时基以秒为单位;h、当前的PID回路号,这里你可以选择需要监视或自整定的PID回路;i、关闭PID调节面板
注意:要使用PID调节控制面板,PID编程必须使用PID向导完成。
三、PID自整定步骤
步:在PID向导中完成PID功能配置(要想使用PID自整定功能,PID编程必须用PID向导来完成)。
第二步:打开PID调节控制面板,设置PID回路调节参数;在Micro/WIN SMART在线的情况下,从主菜单工具中点击“PID控制面板”工具,进入PID调节控制面板中。在PID调节面板的h.区查看已选择的PID回路号,在e.区启动手动调节,调节PID参数并点击更新,使新参数值起作用,监视其趋势图,根据调节状况改变PID参数直至调节稳定。
注意:为了使PID自整定顺利进行,应当做到:
使PID调节器基本稳定,输出、反馈变化平缓,并且使反馈比较接近给定
设置合适的给定值,使PID调节器的输出远离趋势图的上、下坐标轴,以免PID自整定开始后输出值的变化范围受限制
第三步:在e.区点击选项按钮,设定PID自整定选项。如果不是很特殊的系统,也可以不加理会。
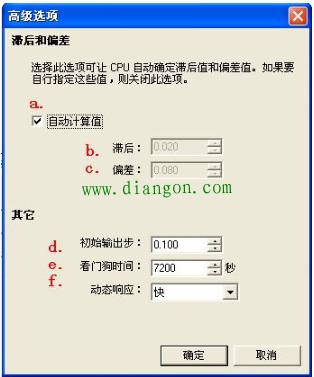
图3. 设置PID自整定选项
在此允许你设定下列参数:
a、你可以选中复选框,让自整定来自动计算滞后值和偏值(对于一般的PID系统,建议使用自动选择);
b、滞后:滞后值规定了允许过程值偏离设定值的大(正负)范围,过程反馈在这个范围内的变化不会引起PID自整定调节器改变输出,或者使PID自整定调节器“认为”这个范围内的变化是由于自己改变输出进行自整定调节而引起的。PID自整定开始后,只有过程反馈值超出了该区域,PID自整定调节器才会认为它对输出的改变发生了效果。这个值用来减少过程变量的噪声对自整定的干扰,从而更**地计算出过程系统的自然振动频率。如果选用自动计算,则缺省值为2%。如果过程变量反馈干扰信号较强(噪声大)自然变化范围就大,可能需要人为设置一个较大的值。但这个值的改变要与下面的偏差值保持1:4的关系。
c、偏差:偏差值决定了允许过程变量偏离设定值的峰峰值。如果选择自动计算该值,它将是死区的4倍,即8%。有些非常敏感的系统不允许过程量偏离给定值很多,也可以人工设置为比较小的值,要和上述“死区”设置保持比例关系。这就是说,一个精度要求高的系统,其反馈信号必须足够稳定。
d、初始输出步:PID调节的初始输出值
PID自整定开始后,PID自整定调节器将主动改变PID的输出值,以观察整个系统的反应。初始步长值就是输出的变动步变化值,以占实际输出量程的百分比表示。
e、看门狗时间:过程变量必须在此时间(时基为秒)内达到或穿越给定值,否则会产生看门狗超时错误。
PID自整定调节器在改变输出后,如果超过此时间还未观察到过程反馈(从下至上或从上至下)穿越给定曲线,则超时。如果能够事先确定实际系统响应非常慢,可以加长这个时间。
f、动态响应选项:根据回路过程(工艺)的要求可选择不同的响应类型:快、中、慢、非常慢
快:可能产生超调,属于欠阻尼响应
中:在产生超调的边缘,属于临界阻尼响应
慢:不会产生任何超调,属于过阻尼响应
非常慢:不会产生任何超调,属于严重过阻尼响应
注意:用户在这里指定需要达到的系统控制效果,而不是对系统本身响应快慢的判断。
g、设定完参数点击OK键回到PID调节控制面板的主画面
第四步:在手动将PID调节到稳定状态后,即过程值与设定值接近,且输出没有不规律的变化,并好处于控制范围中心附近。此时可点击e.区内的启动按钮启动PID自整定功能,这时按钮变为停止。这时只需耐心等待,系统完成自整定后会自动将计算出的PID参数显示在e.区。当按钮变为启动时,表示系统已经完成了PID自整定。
注意:要使用自整定功能,必须保证PID回路处于自动模式。开始自整定后,给定值不能再改变。
第五步:如果用户想将PID自整定的参数应用到当前PLC中,则只需点击更新PLC。
注意:完成PID调整后,好下载一次整个项目(包括数据块),使新参数保存到CPU的EEPROM中。
四、PID自整定失败的原因
1、PID输出在大值与小值之间振荡(曲线接触到坐标轴)
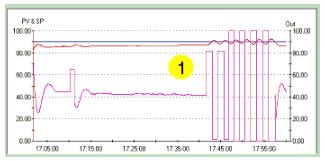
PID响应曲线图
解决方法:降低PID初始输出步长值
2、经过一段时间后,PID自整定面板显示如下信息:“ 自整定计算因为等待反馈穿越给定值的看门狗超时而失败” 。
解决方法: 确定在启动PID自整定前,过程变量和输出值已经稳定。并检查看门狗时间的值,将其适当增大