





西门子6ES7212-1HE40-0XB0型号介绍

是一种脉冲控制的执行元件,可将输入脉冲转换为机械角位移。每给步进电机输入一个脉冲,其转轴就转过一个角度,称为步距角。
| 脉冲数量——位移量 脉冲频率——电机转速 脉冲顺序——方向 优点:结构简单,价格便宜,工作可靠。 缺点:容易失步(尤其在高速、大负载时),影响定位精度,在低速时容易产生振动(但恒流斩波驱动、细分驱动等新技术的综合应用,明显提高了定位精度,降低了低速振动。)。 应用:要求一般的开环伺服驱动系统,如经济型的进给驱动。 步进电机工作原理 按电磁吸引原理工作(以反应式步进电机为例)。
反应式步进电机的定子上有磁极,每个磁极上有激磁绕组,转子无绕组,有周向均布的齿,依靠磁极对齿的吸合工作。两个相对的磁极组成一相。
步进电机的工作方式(通电顺序)可分为三相单三拍、三相单双六拍、三相双三拍等。 1)三相单三拍工作方式 |


三相绕组联接方式:y型
三相绕组中的通电顺序为

也可以为

三相单三拍的特点:
(1)每来一个电脉冲,转子转过30°。
(2)转子的旋转方向取决于三相线圈通电的顺序。
(3)每次定子绕组只有一相通电,在切换瞬间失去自锁转矩,容易产生失步,只有一相绕组产生力矩吸引转子,在平衡位置易产生振荡。
2)三相六拍工作方式

通电顺序为
a→ab→b→bc→c→ca→a…(逆时针)
a→ac→c→bc→b→ba→a…(顺时针)
每步转过15°,步距角是三相三拍工作方式的一半。
三相六拍的特点:电机运转中始终有一相定子绕组通电,运转比较平稳。
3)双三拍工作方式
定子绕组通电顺序为
ab→bc→ca→ab…(转子逆时针旋转)
ac→cb→ba→…(转子顺时针旋转)
有两对磁极对转子的两对齿进行吸引,每步仍旋转30°。
双三拍的特点:始终有一相定子绕组通电,工作比较平稳;避免了单三拍通电方式的缺点。
实际上步进电机转子齿数很多,齿数与步距角关系?
例如:转子40个齿,定子仍是 3对磁极,三相六拍。问步距角是多少?

组成:由磁极(定子)、电枢(转子)、电刷与换向片三部分组成。结构上做的细长一些,主要是为了减小转动惯量,从而满足快速响应的要求。
工作原理:直流接在两电刷间,电流通入电枢线圈,切割磁力线,产生电磁转矩。

电流方向为:n极下的有效边中的电流总是一个方向,而s极上的有效边中的电流总是另一个方向。这样使两个边上受到的电磁力的方向一致,电枢转动。当线圈的有效边从 n极下转到s极下时,其中电流的方向必须改变,以使电磁力的方向不变。这必须通过换向器得以实现。

电磁转矩
![]()
感应电势与转速关系
![]()
电枢回路电压平衡方程式
![]()
他励式直流伺服电机的转速公式
![]()
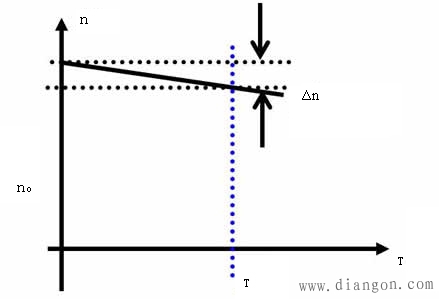
直流电机转速与转矩的关系n=f(t)称机械特性(静态特性)。电机转速与理想转速的差δn,反映了电机机械特性硬度,δn越小(转矩对转速变化的影响程度越小),机械特性越硬。
直流电机的基本调速方式有三种:调节电阻ra、调节电枢电压ua和调节磁通φ的值。电枢电阻调速很少采用,其缺点:不经济,要得到低速,r很大,则消耗大量电能;低速,特性很软,运转稳定性很差;调节平滑性差,操作费力。
调节电枢电压(调压调速)时,直流电机机械特性为一组平行线,只改变电机的理想转速n0,保持了原有较硬的机械特性,调压调速主要用于伺服进给驱动系统电机的调速。如果δn值较大,不可能实现宽范围的调速。永磁式直流伺服电机的δn值较小,进给系统常采用永磁式直流电机。

调节磁通(调磁调速)不但改变了电机的理想转速,使直流电机机械特性变软,调磁调速主要用于机床主轴电机调速。
