





6ES7 211-1AE40-0XB0
的控制方式一般分为开环控制与闭环控制两种控制方式,其中开环控制步进电机简单的控制方式就是玎环控制系统,其原理框图如图5-1所示:

图5-1开环控制原理图在这种控制方式下,步进电机控制脉冲的输入并不依赖于转子的位置,而是按一固定的规律发出控制脉冲,步进电机仅依靠这一系列既定的脉冲而工作,这种控制方式由于步进电机的独特性而比较适合于控制步进电机,适合于我国的国情这种种控制方式的特点是:控制简单、实现容易、价格较低,这种控制方式特别在开环控制中,负载位置对控制电路没有反馈。
步进电机必须『f确地响应每次励磁的变化,如果励磁变化太快,电机不能移动到新的位置,那么实际负载位置与理想位置就会产生一个偏差,在负载基本不变时,控制脉冲序列的产生较为简单,在负载的变化可能较大的场合,控制脉冲序列的产生就很难照顾全面,就有可能出现失步等现象目前随着微机的应用普及,依靠微机,可以实现一些较复杂的步进电机的控制脉冲序列的产生。
这种控制方式也有如下的缺点:电机的输出转矩和速度不仅与负载有很大的关系,在很大程度上还取决于驱动和控制的实现方式,精度不高,有时还会有失步、振荡等现象,但由于它较易实现,价格低廉,故目前所采用的控制方式大多数为开环控制。
闭环控制由于步进电机开环控制系统有精度不高、丢步等缺点,故在精度要求较高的场合可以采用步进电机的闭环控制系统,其原理框图如图5-2所示:
反应式步进特新研究22 图5-2闭环控制原理图

这种控制方式是直接或间接地检测出转予(或负载)的位置或速度,通过反馈和适当的处理,自动地给出步进电机的驱动脉冲序列,这个驱动脉冲序列是根据负载或转子的位置而随时变化的这种控制方式的实现方法很多,在要求精度很高的场合,结合微步驱动技术及微型技术,可以实现很高的位置精度要求。
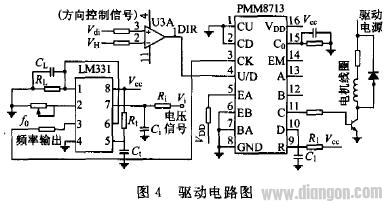
驱动电路如图4所示。外接电阻rt和ct 、内部定时比较器、复零晶体管、r-s触发器等构成单稳定时电路。当输入端vi+输入的电压大于vi-输入端的电压时,f0输出逻辑低电平。电流源ir对电容cl充电。vcc也通过电阻rt对电容ct充电。当电容ct两端的充电电压大于vcc的2/3时,输出端,f0输出逻辑高电平。f0信号输出至pmm8713 芯片的时钟端,该频率经pmm8713处理后,在a、b、c脚输出一定频率的驱动信号来控制功率的导通时间,从而控制的转速。
方向控制电路由lm348四电路通用运算放大器构成。外部方向控制信号通过lm348和基准电压构成电压比较电路。当vdi大于基准电压vh时,u3a输出为正,接至pmm8713的第4脚,控制输出端输出正相脉冲序列。当vdi小于基准电压vh时,输出端为负,接至pmm8713的第4脚,控制输出端输出负相脉冲序列,相应相驱动输出端输出正反向脉冲序列,从而控制步进电机的正反转。
由lm331给出的输入指令是输入时钟f0和方向指令dir,这2个指令在pmm8713中经逻辑组合转换各相通断的时序逻辑信号。pmm8713的相驱动输出端(pin10~pin13)的驱动电流达20 ma以上,能直接驱动微型步进电机。r1、c1为开机时自动初始化电路。初上电的数十毫秒内r端为低电平,从而a~d端自动复位至初始状态。如果外接的步进电机功率较大,pmm8713输出驱动端驱动能力不够,此时应设计功率放大驱动电路,再驱动步进电机。pmm8713各相输出端的导通顺序逻辑信号送至功率驱动段转换成内部功率开关的基极(或栅极)驱动信号。步进电机驱动方式按相绕组流过的电流是单向或双向可分为单极性和双极性驱动,通常,三相步进电饥采用单极性驱动。从功率驱动级电路来分析,又有电压驱动和电流驱动之分。本设计中采用串联电阻电压驱动方式。在相绕组中串接一定阻值和功率的电阻,一方面减小了绕组回路的时间常数,又对低频和静止工作时的电流进行限制。
利用上述原理设计了一个自动闸阀控制器,闸阀的上下位置采用限位开关控制,利用相应的电路使限位开关的动作改变图5所示lm348比较电压输入端电压的大小,从而控制步进电机运转还是停转。其工作原理;lm348的同相输入端为基准电压端,其反向输入端为比较电压输入端,当比较电压输入端的电压小于基准电压时,lm348的1引脚上输出高电平,使bd237导通,从而使步进电机能够实现正转或反转;当比较电压输入端的电压高于基准电压时,在lm348的1引脚上输出低电平,bd237截止,步进电机停转。

步进电机驱动器系统电路原理如图3:
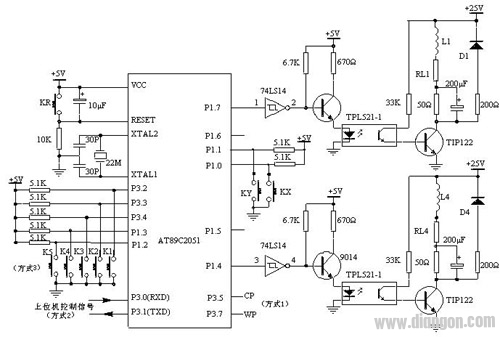
图3 步进电机驱动器系统电路原理图
at89c2051将控制脉冲从p1口的p1.4~p1.7输出,经74ls14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管tip122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。图中l1为步进电机的一相绕组。at89c2051选用频率22mhz的晶振,选用较高晶振的目的是为了在方式2下尽量减小at89c2051对上位机脉冲信号周期的影响。
图3中的rl1~rl4为绕组内阻,50ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。d1~d4为续流,使电机绕组产生的反电动势通过续流二极管(d1~d4)而衰减掉,从而保护了功率管tip122不受损坏。
在50ω外接电阻上并联一个200μf电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。与续流二极管串联的200ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
对于资料上讲的编码器关于零点(参考点)的定义以及偏移问题我看的还很不明白,说增量编码器有零点偏移,值没有,我感觉说的不对,可能我对概念没弄清,希望大家给我指点,十分感谢。
还有就是说单圈值编码器测量范围为360,为什么不是任意角度呢,根据它转的圈数角度测量应该是没限制的吧?

增量式编码器是直接利用光电转换原理输出三组方波脉冲a、b和z相;a、b两组脉冲相位差90?,从而可方便地判断出旋转方向,而z相为每转一个脉冲,用于基准点定位。

其中基准点定位指的是什么?还有就是说a、b两组脉冲相位差90,这也是在一定的条件下(s0=s1=s2/2)才能在电角度上相差90度的,而不是空间上的相位差,是不是这样理解

答:值编码器输出的不是脉冲,而是码值,是一串二进制数(或格雷码等),比如单圈9位值编码器,输出的是一串9位的二进制数,编码器旋转一圈,会有2的9次方个不同的数,超出一圈会出现码值重复,说测量范围是360度。你所说的根据测量圈数去测定任意角度,那是软件上通过编程实现单圈当多圈使用,不是编码器本身的属性。
关于你图里的值编码器的零点偏移,很好理解。值编码,是不不断跳变的量,每旋转一定角度,比如说0.5度,码值变化一次。假设你设定的零点是,你旋转了0.1度,码值很可能不变化,显示的零点没变化,编码器实际位置却变化了,这就是“漂移”了。
增量型编码器,输出的是脉冲,通常是非常规律的正弦波或方波。波的周期取决于编码器精度。ab脉冲相差90度。根据收到的脉冲数,可知编码器旋转了多少,从而确定位移或速度;根据接收到的a超前b或者a落后b,即可确定旋转方向。零脉冲每旋转一圈输出一个脉冲,提供了一个基准点。基准点不懂?大概就是参考点初始点之类的意思,比如百米赛跑,总要有个起跑线吧。