





6ES7312-1AE14-0AB0详细说明
西门子数控系统基本构成
一.西门子840D系统的组成
SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,在说明时将二者划归一处。
1.人机界面
人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:
MMC包括:
- OP单元
- MMC
- MCP三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
a.MMC
我们常用的MMC有两种:
MMCC100.2
MMC103
其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103。
PCU(PC UNIT)是专门为配合西门子的操作面板OP10、OP10S、OP10C、OP12、 OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱。PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。PCU的软件被称作HMI, HMI有分为两种:嵌入式HMI和HMI。一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载HMI。
b.OP
OP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031为常用。
c.MCP
MCP是专门为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定。
对于SINUMERIK840D应用了MPI(Multiple Point Interface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点。为提高人机交互的效率,又有OPI(Operator PanelInterface)总线,它的传输速率为1.5M/秒。
2.数控及驱动单元
a.NCU数控单元
SINUMERIK840D的数控单元被称为NCU(Numenrical Controlunit)单元:中央控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯 它由一个COM CPU板. 一个PLC CPU板和一个DRIVE板组成.
根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2, NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU单元中也集成SINUMERIK840D数控CPU和SIMATIC PLC CPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus借口,RS232借口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧。
b.数字驱动
数字伺服:运动控制的执行部分,由611D伺服驱动和1FT6(1FK6)电机组成 SINUMERIK840D配置的驱动一般都采用SIMODRIVE611D.它包括两部分:电源模块+驱动模块(功率模块)。
电源模块:主要为NC和给驱动装置提供控制和动力电源,产生母线电压,监测电源和模块状态。根据容量不同,凡小于15KW均不带馈入装置,极为U/E电源模块;凡大于15KW均需带馈入装置,记为I/RF电源模块,通过模块上的订货号或标记可识别。
611D数字驱动:是新一代数字控制总线驱动的交流驱动,它分为双轴模块和单轴模块两种,相应的进给伺服电机可采用1FT6或者1FK6系列,编码器信号为1Vpp正弦波,可实现全闭环控制
S7连接组态
本例中使用S7-300作为样例建立S7连接,对于S7-400的组态步骤是一样的。
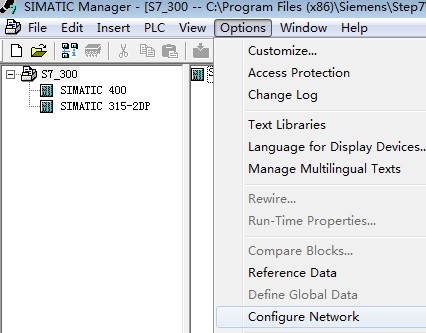
在STEP7中打开S7-300项目文件,通过Options--Configure Network或者是相对应的图标打开NetPro对话框。
在NetPro中选中S7-300站的CPU并通过菜单命令,Insert--New Connection添加一个新连接。
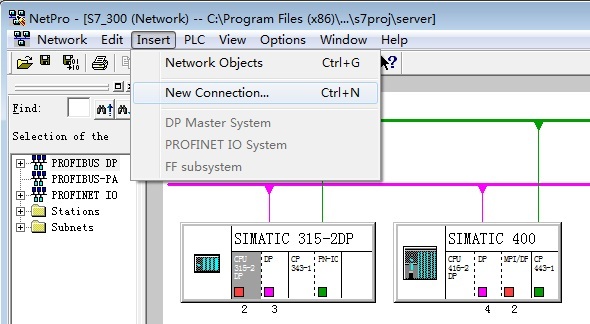
选择连接伙伴为“unspecified"及连接类型为“S7 connection"。点击“Apply"按钮,之后S7连接的属性对话框将打开。

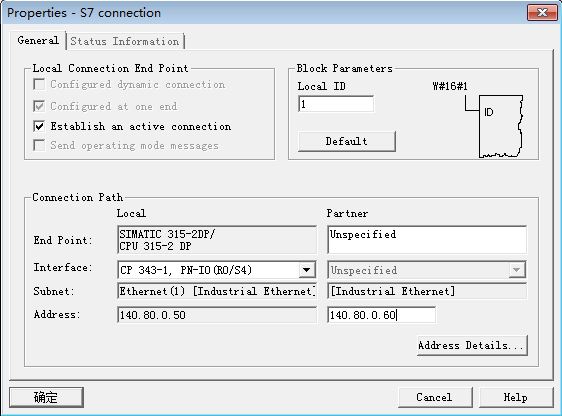
由于S7连接是由S7-300创建,在S7连接的属性对话框中须激活“Establish an active connection“复选框。输入通信伙伴CP243-1的IP地址,之后点击“Address Details"按钮。
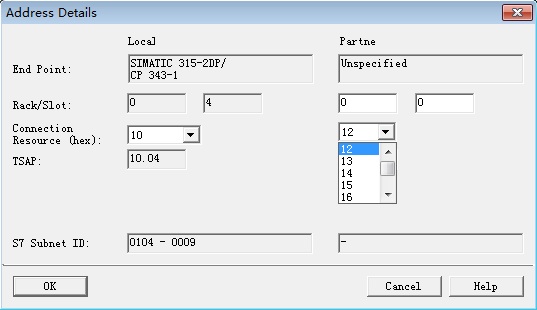
在“Address Details"对话框中,本地的TSAP通常选用默认,输入通信伙伴的TSAP,本例中S7-200的TSAP为12.00。
注意:分别组态S7-200和S7-300时,本地和远程的TSAP号是必须*对应的。通常本地TSAP是默认的,在组态此步骤时,需要两边确认一下。
在NetPro中选中S7-300站,保存及编译后下载到S7-300 中,此处注意需要下载网络组态。
对于S7-400的组态步骤一样,需要对应本地TSAP及伙伴S7-200的TSAP (例子中为13.00)。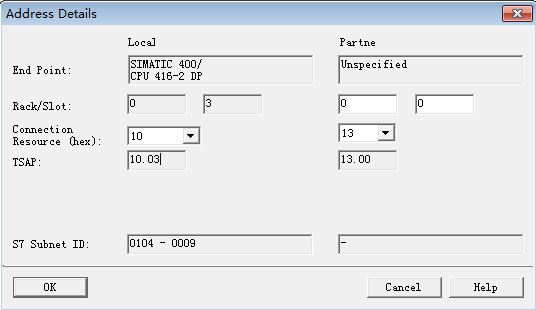
6SN1118-1NH01-0AA1
STEP7编写PUT/GET程序
需要在S7-300程序中,调用功能块FB14 “GET" 和 FB15 “PUT"。可以在Standard Library--Communication Blocks--Blocks下找到这些功能块。
注意:
1. ID:为Netpro里组态S7连接属性窗口中的Block paramters-Local ID。
2.ADDR_1为伙伴PLC的数据区域,由于通信伙伴是S7-200的V区,V区与S7-300的DB1地址相对应。
3.RD_1为本地PLC的数据接收区;SD_1为本地PLC的数据发送区。

如果通信无法建立,请查看“PUT"和“GET"指令的错误代码,STATUS仅在一个周期内有效,需要在ERROR=1时捕捉错误状态。如下图所示:
对于FB14 “GET" 和 FB15 “PUT"的输入参数'ID",也可通过鼠标右击功能块ID引脚,可以自动插入本地ID连接。如下图所示:

如果使用S7-400必须调用功能块SFB14 “GET" 和 SFB15 “PUT"。可以在Standard Library--System Function Blocks--Blocks 找到这些功能块.
S7-300中调用功能块FB14 “GET" 和FB15 “PUT"的例子程序
可以通过以下ID号找到S7-300中调用功能块FB14 “GET" 和 FB15 “PUT"的例子程序: 18610307。
S7-400中调用功能块SFB14 “GET"和SFB15 “PUT"的例子程序
可以通过以下ID号找到S7-400中调用功能块SFB14 “GET" 和 SFB15 “PUT"的例子程序:: 1819293。
6SN1118-1NH01-0AA1
S7-200自由口通信简介
S7-200 CPU的通信口可以设置为自由口模式。选择自由口模式后,用户程序就可以*控制通信端口的操作,通信协议也*受用户程序控制。一般用于和第三方串行通信设备进行通信。
自由口模式可以灵活应用。Micro/WIN的两个指令库(USS和Modbus RTU)就是使用自由口模式编程实现的。
 在进行自由口通信程序调试时,可以使用PC/PPI电缆(设置到自由口通信模式)连接PC和CPU,在PC上运行串口调试软件(或者Windows的Hyper Terminal-超级终端)调试自由口程序。
在进行自由口通信程序调试时,可以使用PC/PPI电缆(设置到自由口通信模式)连接PC和CPU,在PC上运行串口调试软件(或者Windows的Hyper Terminal-超级终端)调试自由口程序。  USB/PPI电缆和CP卡不支持自由口调试。
USB/PPI电缆和CP卡不支持自由口调试。
1自由口通信基本概念
1.1 自由口通信概述S7-200PLC的通讯口支持RS485接口标准。采用正负两根信号线作为传输线路。
工作模式采用串行半双工形式,在任意时刻只允许由一方发送数据,另一方接收数据。
数据传输采用异步方式,传输的单位是字符,收发双方以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。
传输速率可以设置为1200、2400、4800、9600、19200、38400、57600、115200。
字符帧格式为一个起始位、7或8个数据位、一个奇/偶校验位或者无校验位、一个停止位。
字符传输从低位开始,空闲线高电平、起始位低电平、停止位高电平。字符传输时间取决于波特率。
数据发送可以是连续的也可以是断续的。所谓连续的数据发送,是指在一个字符格式的停止位之后,立即发送下一个字符的起始位,之间没有空闲线时间。而断续的数据发送,是指当一个字符帧发送后,总线维持空闲的状态,新字符起始位可以在任意时刻开始发送,即上一个字符的停止位和下一个字符的起始位之间有空闲线状态。
示例:用PLC连续的发送两个字符(16#55和16#EE)(程序如图3和图4),通过示波器测量CPU通讯端口管脚3/8之间的电压,波形如下图1.:
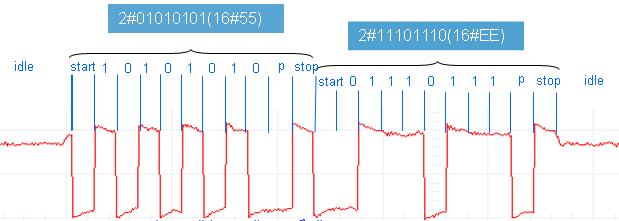
图1.两个字符(16#55和16#EE)的波形图
示例说明:
16进制的16#55换算成2进制等于2#01010101,16进制的16#EE换算成2进制等于2#11101110。如图所示,当数据线上没有字符发送时总线处于空闲状态(高电平),当PLC发送*个字符16#55时,先发送该字符帧的起始位(低电平),再发送它的8个数据位,依次从数据位的低位开始发送(分别为1、0、1、0、1、0、1、0),接着发送校验位(高电平或低电平或无)和停止位(高电平)。因为本例中PLC连续的发送两个字符,*个字符帧的停止位结束后便立即发送下一个字符帧的起始位,之间数据线没有空闲状态。假如PLC断续的发送这两个字符,那么当PLC发送完*个字符帧的停止位后,数据线将维持一段时间空闲状态,再发送下一个字符帧。
字符传输的时间取决于波特率,如果设置波特率为9.6k,那么传输一个字符帧中的一位用时等于1/9600*1000000=104us,如果这个字符帧有11位,那么这个字符帧的传输时间等于11/9600*1000=1.145ms.
 自由口通信协议是什么?
自由口通信协议是什么?
顾名思义,没有什么标准的自由口协议。用户可以自己规定协议。
已知一个通信对象需要字符(字节)传送格式有两个停止位,S7-200是否支持?
字符格式是由基础的硬件(芯片)决定的;S7-200使用的芯片不支持上述格式。
S7-200是否支持《S7-200系统手册》上列明的通信波特率以外的其他特殊通信速率?
通信速率是由基础的硬件(芯片)决定的;S7-200使用的芯片不支持没有列明在手册上的通信速率。
1.2 自由口通信要点应用自由口通信要把通信口定义为自由口模式,设置相应的通信波特率和上述通信格式。用户程序通过特殊存储器SMB30(对端口0)、SMB130(对端口1)控制通信口的工作模式。
CPU通信口工作在自由口模式时,通信口就不支持其他通信协议(比如PPI),此通信口不能再与编程软件Micro/WIN通信。CPU停止时,自由口不能工作,Micro/WIN就可以与CPU通信。
通信口的工作模式,是可以在运行过程中由用户程序重复定义的。
如果调试时需要在自由口模式与PPI模式之间切换,可以使用SM0.7的状态决定通信口的模式;而SM0.7的状态反映的是CPU运行状态开关的位置(在RUN时SM0.7="1",在STOP时SM0.7="0") 自由口通信的核心指令是发送(XMT)和接收(RCV)指令。在自由口通信常用的中断有"接收指令结束中断"、"发送指令结束中断",以及通信端口缓冲区接收中断。 与网络读写指令(NetR/NetW)类似,用户程序不能直接控制通信芯片而必须通过操作系统。用户程序使用通信数据缓冲区和特殊存储器与操作系统交换相关的信息。 XMT和RCV指令的数据缓冲区类似,起始字节为需要发送的或接收的字符个数,随后是数据字节本身。如果接收的消息中包括了起始或结束字符,则它们也算数据字节。 调用XMT和RCV指令时只需要通信口和数据缓冲区的起始字节地址。
XMT和RCV指令与NetW/NetR指令不同的是,它们与网络上通信对象的"地址"无关,而仅对本地的通信端口操作。如果网络上有多个设备,消息中必然包含地址信息;这些包含地址信息的消息才是XMT和RCV指令的处理对象。
由于S7-200的通信端口是半双工RS-485芯片,XMT指令和RCV指令不能有效