





西门子电机6SL3120-2TE15-0AD0参数详细
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:
1. 理论计算整定法
它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
2. 工程整定方法
它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行*后调整与完善。现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整定步骤如下:
(1)预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;
(3)在一定的控制度下通过公式计算得到PID控制器的参数。
PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
PID调试一般步骤
a. 确定比例增益P
确定比例增益P 时,去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的*大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b. 确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c. 确定积分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
d. 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
变速积分的基本思想是,设法改变积分项的累加速度,使其与偏差大小相对应:偏差越大,积分越慢;则越快,有利于提高系统品质
整数是指正整数、负整数和零,如-6、0、32 等。
浮点数是指带有有限位小数的有理数,如-10.8、0.00、25.01 等。
整数既可以是整数,也可以是浮点数,例如255 是整数,而255.0 则是浮点数。
整数运算,得到的结果是一个整数,并且计算结果中的小数部分将被忽略。例如:用整数运算时,100÷3=33。
浮点运算,得到的结果是一个浮点数,计算结果中的小数部分将保留下来。
例如:用浮点运算时,100.0÷3.0=33.33333333。
浮点式:
4.2×10^8=
整数式:
42×1000000=
浮点运算性能可以直观地反映一个cpu的计算能力,注意是“计算能力”
浮点数在计算机中用以近似表示任意某个实数。具体的说,这个实数由一个整数或定点数(即尾数)乘以某个基数(计算机中通常是2)的整数次幂得到,这种表示方法类似于基数为10的科学记数法。
浮点计算是指浮点数参与的运算,这种运算通常伴随着因为无法**表示而进行的近似或舍入。
一个浮点数a由两个数m和e来表示:a = m × be。在任意一个这样的系统中,我们选择一个基数b(记数系统的基)和精度p(用多少位来存储)。m(即尾数)是形如±d.ddd...ddd的p位数(每一位是一个介于0到b-1之间的整数,包括0和b-1)。如果m的第一位是非0整数,m称作规格化的。有一些描述使用一个单独的符号位(s 代表+或者-)来表示正负,这样m必须是正的。e是指数。
这种设计可以在某个固定长度的存储空间内表示定点数无法表示的更大范围的数。
例如,一个指数范围为±4的4位十进制浮点数可以用来表示43210,4.321或0.0004321,没有足够的精度来表示432.123和43212.3(必须近似为432.1和43210)。当然,实际使用的位数通常远大于4。
浮点数表示法通常还包括一些特别的数值:+∞和?6?1∞(正负无穷大)以及NaN('Not a Number')。无穷大用于数太大而无法表示的时候,NaN则指示非法操作或者无法定义的结果。
大部份计算机采用二进制(b=2)的表示方法。位(bit)是衡量浮点数所需存储空间的单位,通常为32位或64位,分别被叫作单精度和双精度。有一些计算机提供更大的浮点数,例如英特尔公司的浮点运算单元Inbbb8087协处理器(以及其被集成进x86处理器中的后代产品)提供80位长的浮点数,用于存储浮点运算的中间结果。还有一些系统提供128位的浮点数
随着当下电气工控领域技术的快速发展,装置设备升级换代大量展开,社会上对于该类产品的维修需求,也是日益增多。
为了迎合社会需求,部分电工从业人员便欲加入该行业。对于这部分同行,或许已经掌握了充足的理论知识,并配备了各种工具、万用表甚至是价格不菲的示波器,可**这些对于实际维修工作而言还是远远不够的!为此,笔者根据多年维修经验向大家介绍三种必需的维修装置。
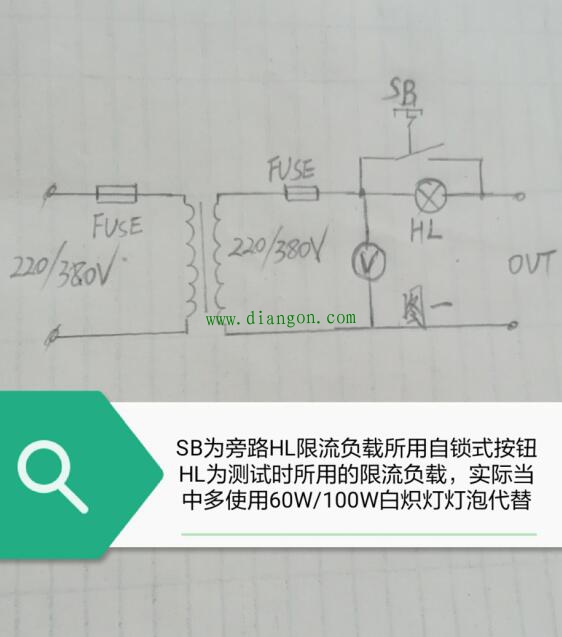
一、隔离变压器
现阶段绝大部分电气工控设备的工作电压多为AC220V/AC380V两种电压等级。在实际维修调试过程中,如果直接使用电网电源进行操作,恐怕稍有不慎就会导致触电事故(即便装有漏保开关,被电的感觉也不好受啊)!
为了避免上面的危险情况发生,自绕或购买一只220v:220v;380v:380v;220v:220v、380V等电压等级的隔离变压器,**是你必备的维修神器!为了预防检修过程中,故障隐患未排除彻底而带来的短路故障对于变压器的冲击和避免待修设备故障扩大化,大家完全可以在隔离变压器输出端进行如图一所示的限流装置。至于可调交流电源的制作,笔者将在后续文章当中,进行专门的介绍。
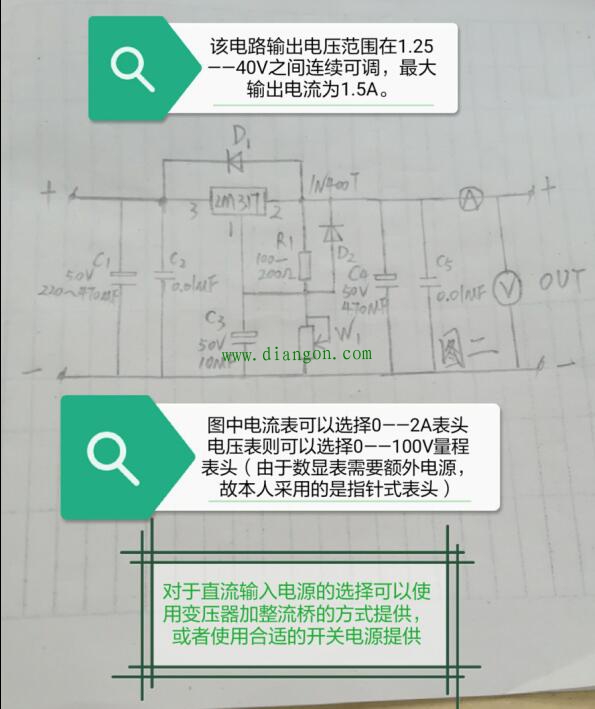
二、直流可调电源
针对实际维修过程中,有时还需使用不同电压值的直流电源,对诸如小至直流继电器、LED发光二极管等元器件的检测;大到工控设备某功能单元线路进行调试检修。由于实际情况中所需直流电压等级较多(例如3.3V、±5V、9V、±12V、±15V、24V等),故电压等级可以连续调节,甚至输出电流可以设定为恒流模式的直流可调电源,同样是你维修工作当中的标配装置。
除了购买成品的直流可调电源外,对于我们这些动手能力强的电工人,完全可以自行DIY一款属于自己的直流可调电源。图二所示就是笔者根据书中线路,自行改进制作的一款价格低廉却非常实用的直流可调电源,完全可以满足实际维修中的大多数需求,在此奉献给广大同行。
三、白炽灯灯泡
或许广大同行认为笔者在开玩笑——白炽灯灯泡一种眼看就要退出历史舞台的老古董,要之何用!其实在实际维修工作当中,白炽灯灯泡有这非常大的用处:图一中的白炽灯灯泡充当限流作用,wwW.diangon.com可以直观、快速的反映出电路的工作状态;对于软启动器、变频器这类需要进行挂载测试的电气工控设备,配置价格高、体积大的电动机有些不太现实,此时采用串联组成的白炽灯灯泡组则可以充当假负载这个角色,毕竟对于电压和频率的变化完全可以通过观察白炽灯灯泡的明暗、闪烁程度来进行判定;对于大容量的电解储能(滤波)电容的放电,白炽灯灯泡也是****
| 家用断路器总是跳闸,只有可能是以下五种原因——下面我详细说一说每种原因,以及相应的表现特征。 1.开关损坏 开关坏了什么事情都有可能发生,无缘无故的跳闸更是常见。可以把跳闸的开关负载端的线拆掉,换上其它回路的负载接上,看看是不是还跳闸。如果依然跳闸,就证明开关坏掉了。 开关损坏其实**解决,直接买个开关换上就行了——**给旧开关拍个照片,买个一模一样的新开关。 2.过载 或者叫“过热”。任何一个断路器都具有过载保护功能,如果线路中的电流过大,就会触发过载保护。跳闸后,应该检查线路中的负载数量,看看是否有总电流过大的情况。 为什么又叫“过热”呢?因为断路器检测是否过载,依靠的是“电流的热效应”(检测温度),即电流越大,发热量越大。电流发热的公式是Q=I²Rt,除了电流增加以外,增大电阻,也会发热。如果存在虚接、电线过细等情况,也会触发断路器的过载保护。还应该检查电线接头(特别是开关负载端接线柱)情况, 看看是否有虚接。
|


